School of Electrical Engineering, Shenyang University of Technology, Shenyang, China.
Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang, China.
Comput Intell Neurosci. 2022 Mar 16;2022:3033920. doi: 10.1155/2022/3033920. eCollection 2022.
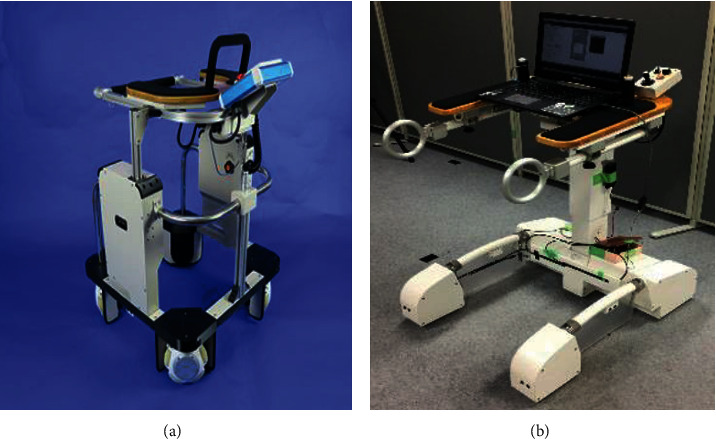
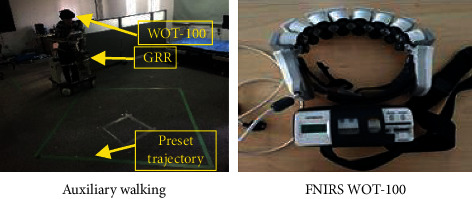
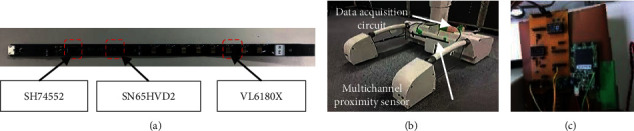
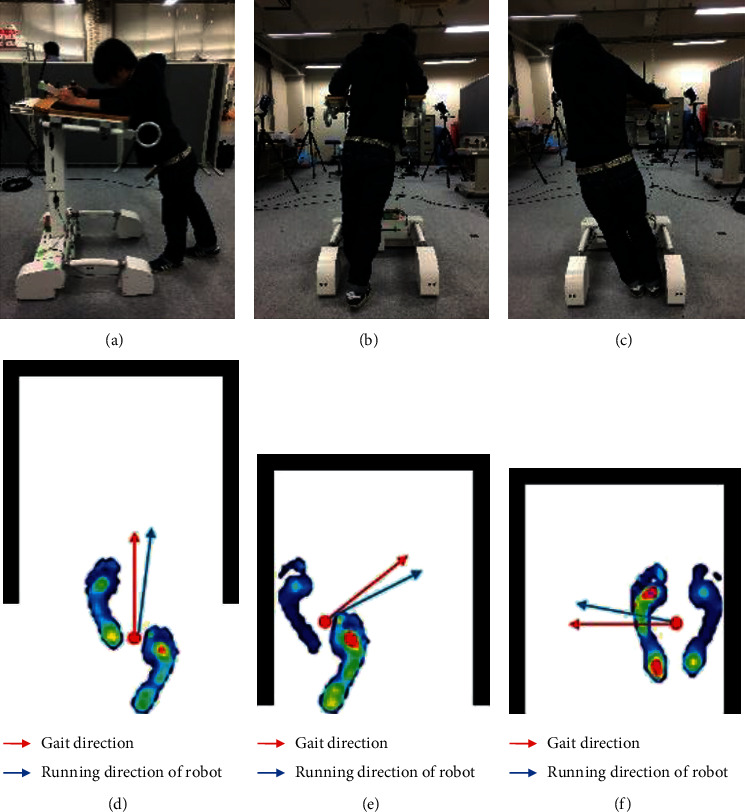
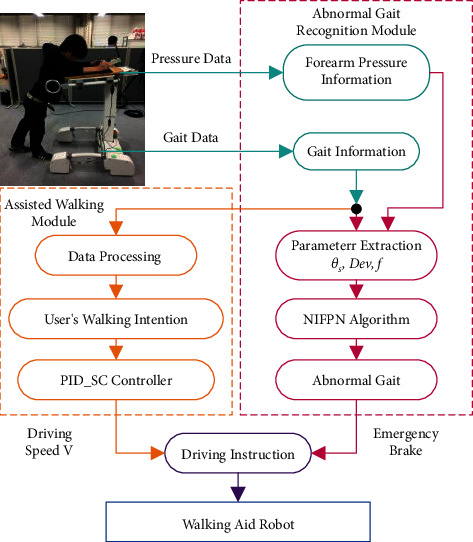
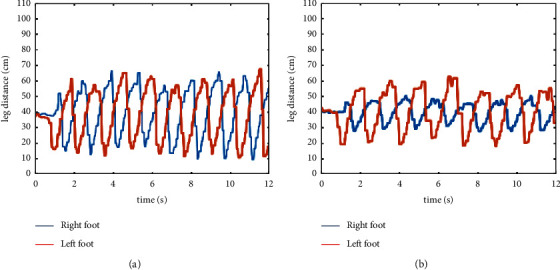
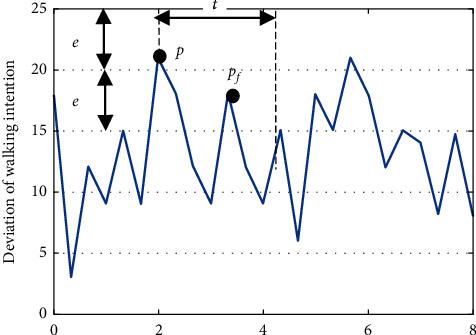
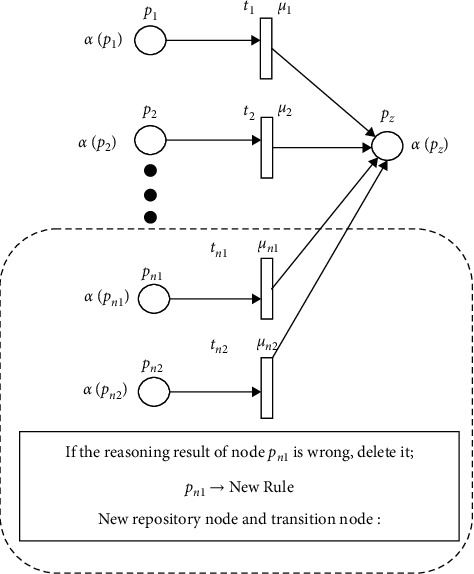
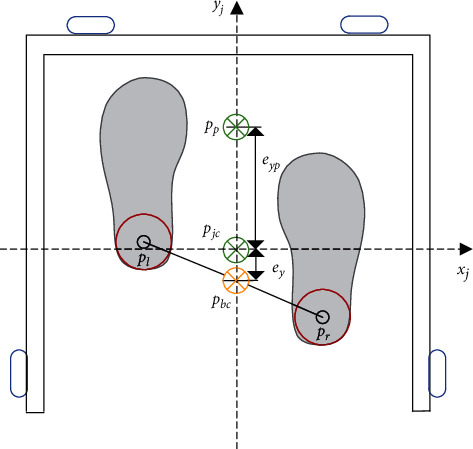
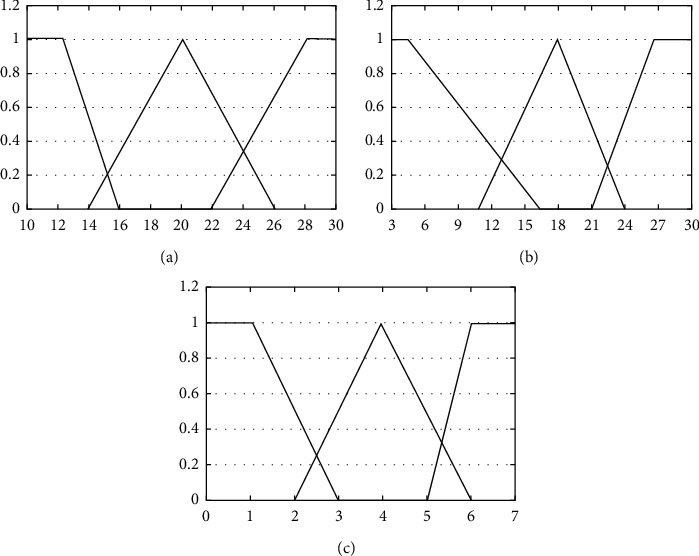
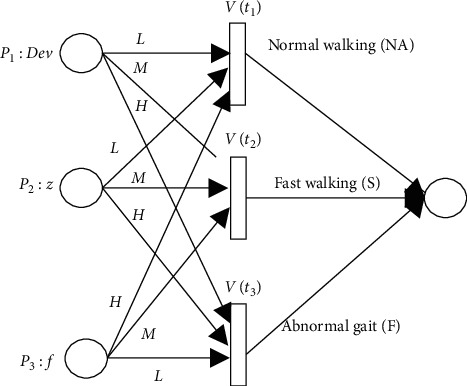
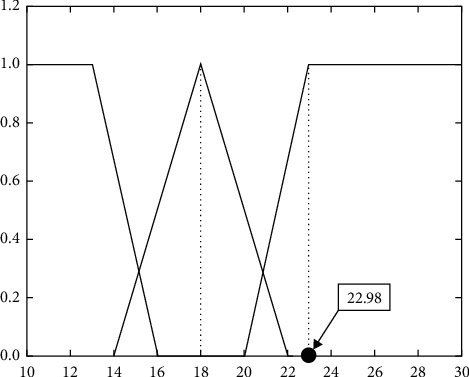
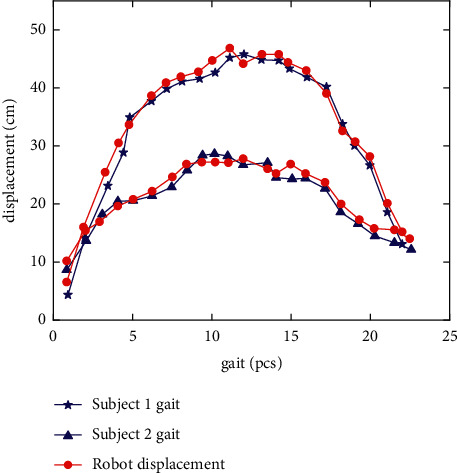
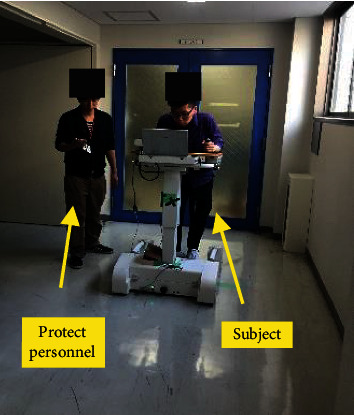
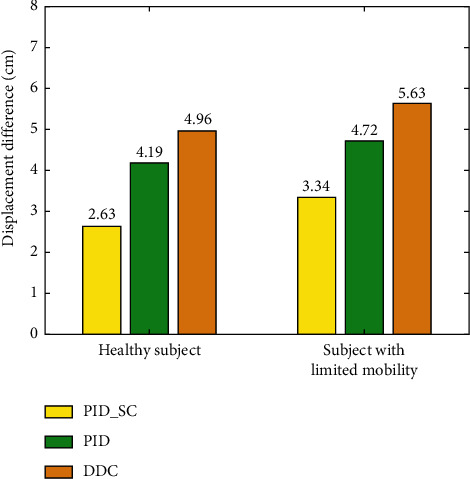
Aiming at promptly and accurately detecting falls and drag-to gaits induced by asynchronous human-robot movement speed during assisted walking, a noncontact interactive approach with generality, compliance and safety is proposed in this paper, and is applied to a wheeled walking aid robot. Firstly, the structure and the functions of the wheeled walking aid robot, including gait rehabilitation robot (GRR) and walking aid robot (WAR) are illustrated, and the characteristic futures of falls and the drag-to gait are shown by experiments. To obtain gait information, a multichannel proximity sensor array is developed, and a two-dimensional gait information detection system is established by combining four proximity sensors groups which are installed in the robot chassis. Additionally, a node-iterative fuzzy Petri net algorithm for abnormal gait recognition is proposed by generating the network trigger mechanism using the fuzzy membership function. It integrates the walking intention direction vector by taking gait deviation, frequency, and torso angle as input parameters of the system. Finally, to improve the compliance of the robot during human-robot interaction, a PID_SC controller is designed by integrating the gait speed compensation, which enables the WAR to track human gait closely. Abnormal gait recognition and assisted walking experiments are carried out respectively. Experimental results show that the proposed algorithm can accurately identify abnormal gaits of different groups of users with different walking habits, and the recognition rate of abnormal gait reaches 91.2%. Results also show that the developed method can guarantee safety in human robot interaction because of user gate follow-up accuracy and compliant movements. The noncontact interactive approach can be applied to robots with similar structure for usage in walking assistance and gait rehabilitation.
针对辅助行走过程中人与机器人异步运动速度引起的跌倒和拖拽步态,本文提出了一种通用、顺应性和安全性的非接触式交互方法,并将其应用于轮式助行机器人。首先,说明了轮式助行机器人的结构和功能,包括步态康复机器人(GRR)和助行机器人(WAR),并通过实验展示了跌倒和拖拽步态的特点。为了获取步态信息,开发了多通道接近传感器阵列,并通过结合安装在机器人底盘上的四个接近传感器组,建立了二维步态信息检测系统。此外,通过使用模糊隶属函数生成网络触发机制,提出了一种用于异常步态识别的节点迭代模糊 Petri 网算法。它通过将步态偏差、频率和躯干角度作为系统的输入参数,整合行走意图方向向量。最后,为了提高机器人在人机交互过程中的顺应性,通过整合步态速度补偿,设计了 PID_SC 控制器,使 WAR 能够紧密跟踪人体步态。分别进行了异常步态识别和辅助行走实验。实验结果表明,所提出的算法可以准确识别不同行走习惯的不同用户群体的异常步态,异常步态的识别率达到 91.2%。结果还表明,所开发的方法可以保证人机交互的安全性,因为用户门跟随精度和顺应性运动。这种非接触式交互方法可应用于具有类似结构的机器人,用于行走辅助和步态康复。