Interventional Molecular Imaging Laboratory, Department of Radiology, Leiden University Medical Center, Leiden, The Netherlands.
Department of Urology, Netherlands Cancer Institute-Antoni van Leeuwenhoek Hospital, Amsterdam, The Netherlands.
J Robot Surg. 2023 Feb;17(1):131-140. doi: 10.1007/s11701-022-01382-0. Epub 2022 Apr 9.
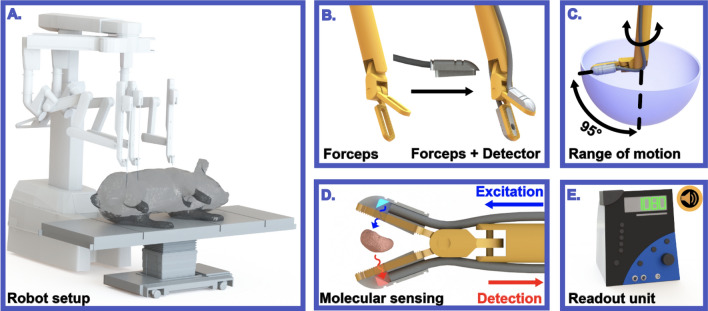
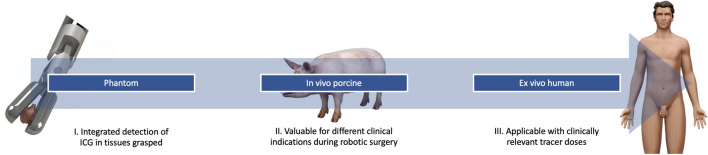
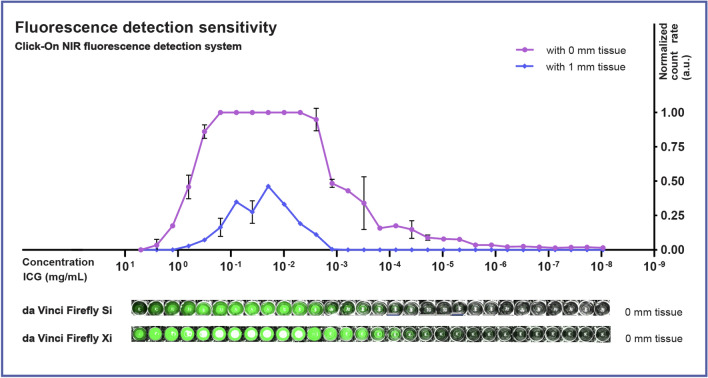
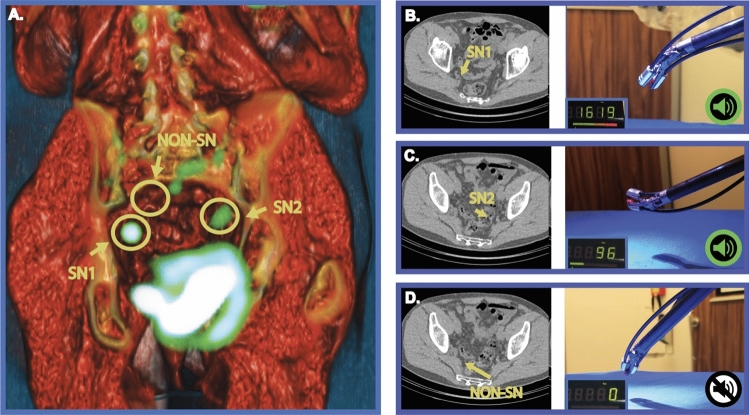
Fluorescence imaging is increasingly being implemented in surgery. One of the drawbacks of its application is the need to switch back-and-forth between fluorescence- and white-light-imaging settings and not being able to dissect safely under fluorescence guidance. The aim of this study was to engineer 'click-on' fluorescence detectors that transform standard robotic instruments into molecular sensing devices that enable the surgeon to detect near-infrared (NIR) fluorescence in a white-light setting. This NIR-fluorescence detector setup was engineered to be press-fitted onto standard forceps instruments of the da Vinci robot. Following system characterization in a phantom setting (i.e., spectral properties, sensitivity and tissue signal attenuation), the performance with regard to different clinical indocyanine green (ICG) indications (e.g., angiography and lymphatic mapping) was determined via robotic surgery in pigs. To evaluate in-human applicability, the setup was also used for ICG-containing lymph node specimens from robotic prostate cancer surgery. The resulting Click-On device allowed for NIR ICG signal identification down to a concentration of 4.77 × 10 mg/ml. The fully assembled system could be introduced through the trocar and grasping, and movement abilities of the instrument were preserved. During surgery, the system allowed for the identification of blood vessels and assessment of vascularization (i.e., bowel, bladder and kidney), as well as localization of pelvic lymph nodes. During human specimen evaluation, it was able to distinguish sentinel from non-sentinel lymph nodes. With this introduction of a NIR-fluorescence Click-On sensing detector, a next step is made towards using surgical instruments in the characterization of molecular tissue aspects.
荧光成像是越来越多地应用于手术中。它的应用的一个缺点是需要在荧光和白光成像设置之间来回切换,并且不能在荧光引导下安全解剖。本研究的目的是设计“点击式”荧光探测器,将标准的机器人器械转化为分子传感设备,使外科医生能够在白光环境下检测近红外(NIR)荧光。该近红外荧光探测器的设计是为了压配合到达芬奇机器人的标准夹具器械上。在体模环境下对系统进行了特性描述(即光谱特性、灵敏度和组织信号衰减)后,通过在猪身上进行机器人手术来确定其在不同临床吲哚菁绿(ICG)指征(如血管造影和淋巴作图)方面的性能。为了评估在人体中的适用性,该设备还用于机器人前列腺癌手术中含有吲哚菁绿的淋巴结标本。所得到的点击式设备允许识别浓度低至 4.77×10 mg/ml 的近红外 ICG 信号。整个系统可以通过 trocar 引入并夹持,且器械的运动能力得以保留。在手术过程中,该系统允许识别血管并评估血管化(即肠、膀胱和肾脏),以及定位盆腔淋巴结。在对人体标本进行评估时,它能够区分前哨和非前哨淋巴结。通过引入近红外荧光点击式传感探测器,向着使用手术器械来描述分子组织特征迈出了下一步。