Horio Masaya, Feng Yu, Kokado Tomoya, Takasawa Taishi, Yasutomi Keita, Kawahito Shoji, Komuro Takashi, Nagahara Hajime, Kagawa Keiichiro
Graduate School of Integrated Science and Technology, Shizuoka University, Shizuoka 422-8011, Japan.
Research Institute of Electronics, Shizuoka University, Shizuoka 422-8011, Japan.
Sensors (Basel). 2022 Mar 22;22(7):2442. doi: 10.3390/s22072442.
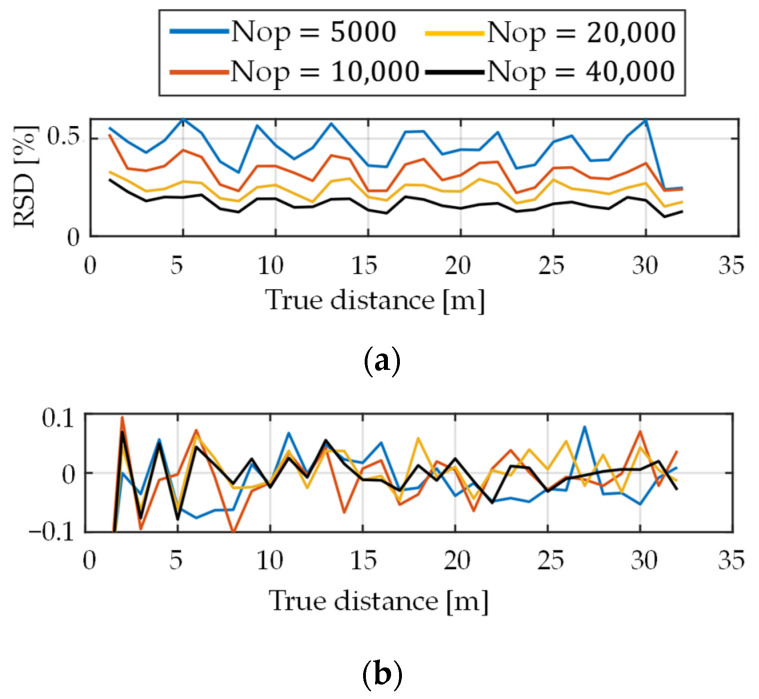
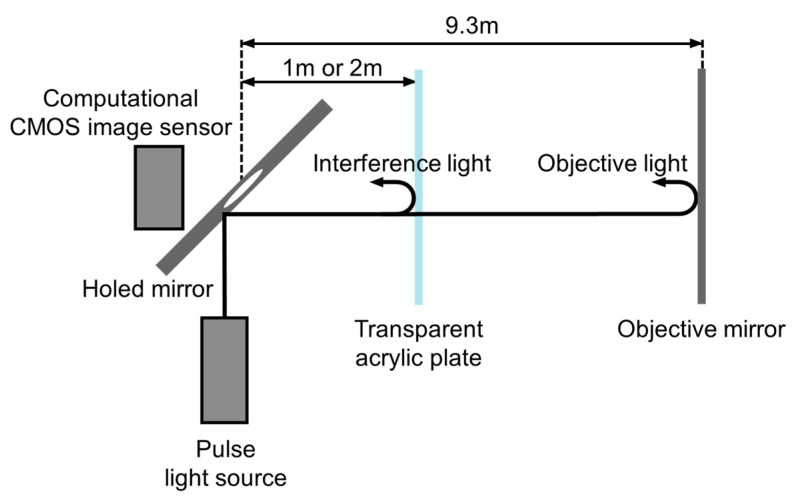
Multi-path interference causes depth errors in indirect time-of-flight (ToF) cameras. In this paper, resolving multi-path interference caused by surface reflections using a multi-tap macro-pixel computational CMOS image sensor is demonstrated. The imaging area is implemented by an array of macro-pixels composed of four subpixels embodied by a four-tap lateral electric field charge modulator (LEFM). This sensor can simultaneously acquire 16 images for different temporal shutters. This method can reproduce more than 16 images based on compressive sensing with multi-frequency shutters and sub-clock shifting. In simulations, an object was placed 16 m away from the sensor, and the depth of an interference object was varied from 1 to 32 m in 1 m steps. The two reflections were separated in two stages: coarse estimation based on a compressive sensing solver and refinement by a nonlinear search to investigate the potential of our sensor. Relative standard deviation (precision) and relative mean error (accuracy) were evaluated under the influence of photon shot noise. The proposed method was verified using a prototype multi-tap macro-pixel computational CMOS image sensor in single-path and dual-path situations. In the experiment, an acrylic plate was placed 1 m or 2 m and a mirror 9.3 m from the sensor.
多径干扰会导致间接飞行时间(ToF)相机出现深度误差。本文展示了使用多抽头宏像素计算型CMOS图像传感器解决由表面反射引起的多径干扰问题。成像区域由由四个子像素组成的宏像素阵列实现,这四个子像素由四抽头横向电场电荷调制器(LEFM)体现。该传感器可以同时获取16张不同时间快门的图像。这种方法可以基于多频快门和子时钟移位的压缩感知再现超过16张图像。在模拟中,将一个物体放置在距离传感器16米处,干扰物体的深度在1米到32米之间以1米的步长变化。通过两个阶段分离两次反射:基于压缩感知求解器的粗估计和通过非线性搜索的细化,以研究我们传感器的潜力。在光子散粒噪声的影响下评估相对标准偏差(精度)和相对平均误差(准确性)。在单路径和双路径情况下,使用原型多抽头宏像素计算型CMOS图像传感器验证了所提出的方法。在实验中,将一块丙烯酸板放置在距离传感器1米或2米处,一面镜子放置在距离传感器9.3米处。