Department of Mechatronics Engineering, Hanyang University, 55, Hanyangdaehak-ro, Sangnok-gu, Ansan-si 15588, Gyeonggi-do, Korea.
Neuromuscular Control and Human Robotics Laboratory, Arizona States University, Tempe, AZ 85281, USA.
Sensors (Basel). 2022 Mar 23;22(7):2462. doi: 10.3390/s22072462.
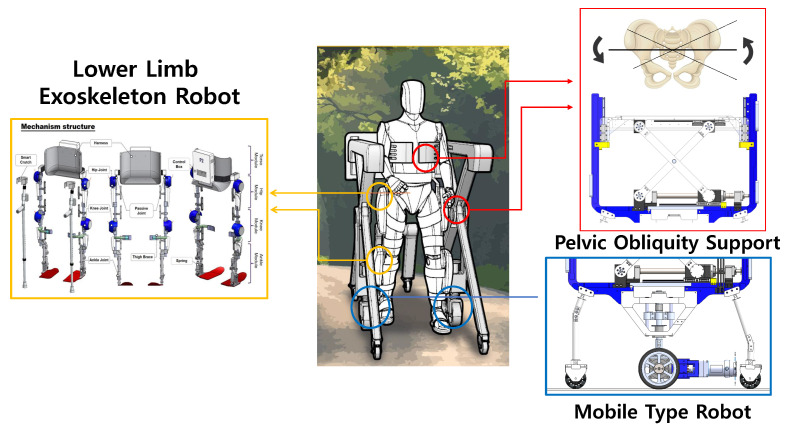
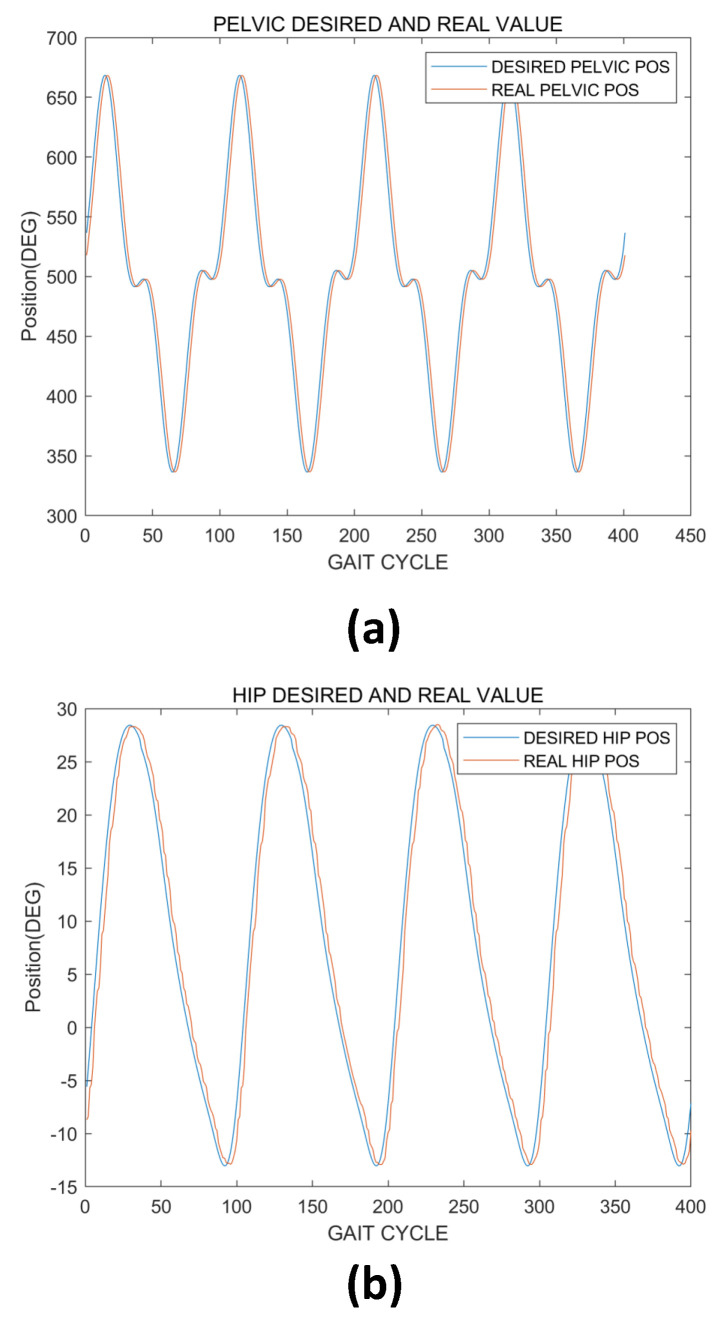
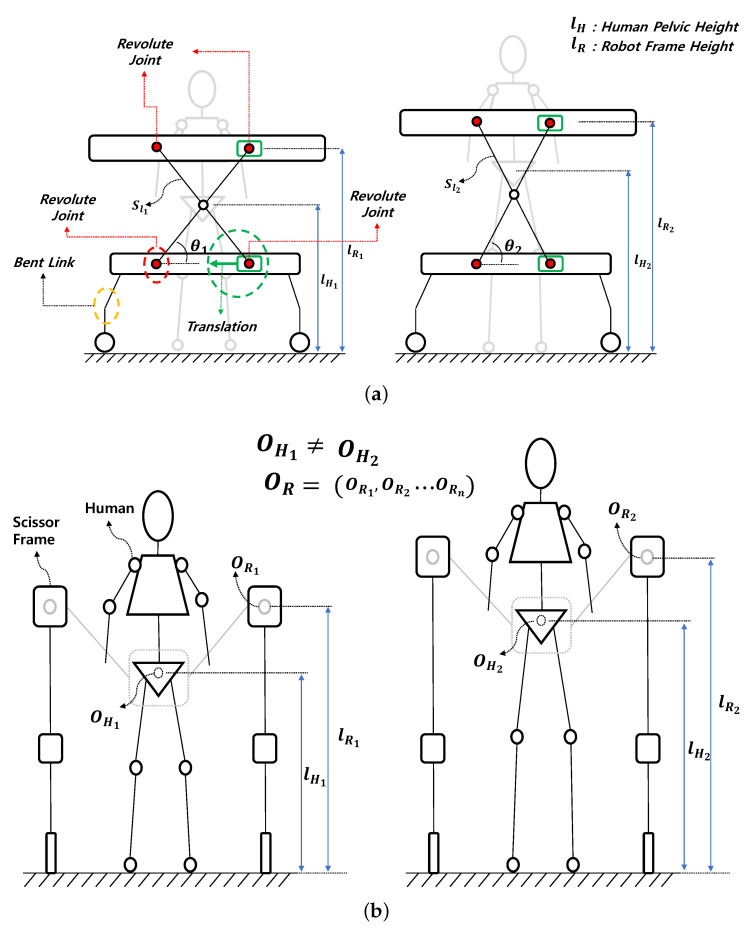
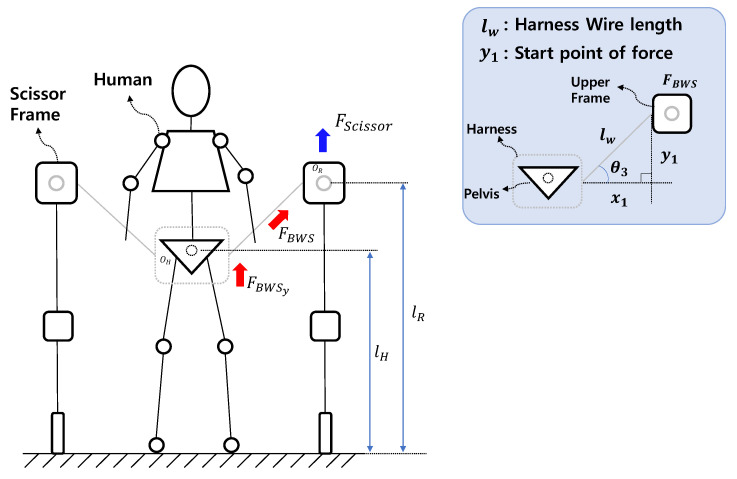
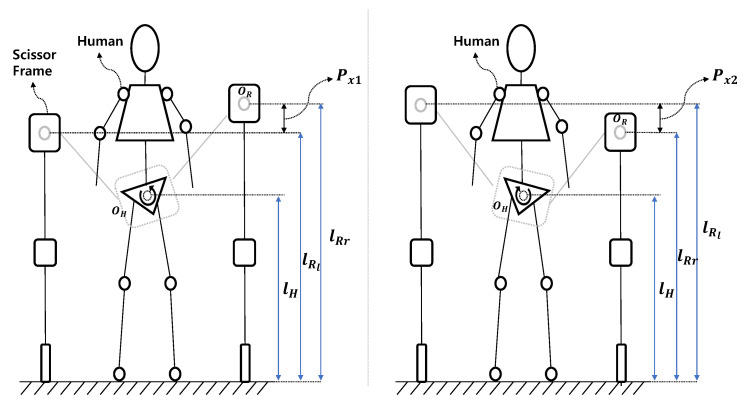
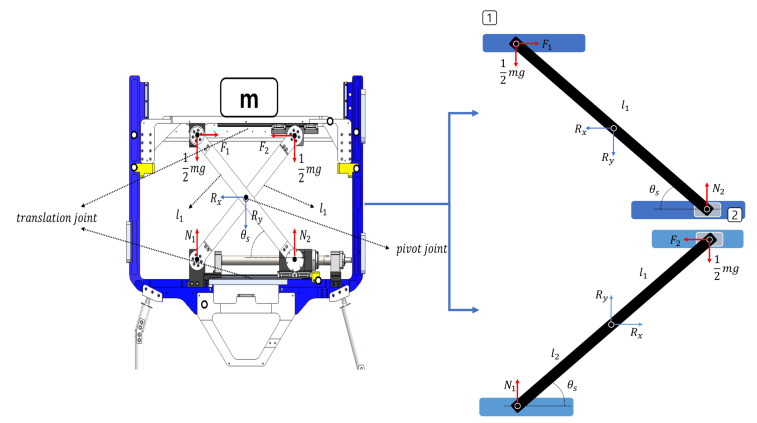
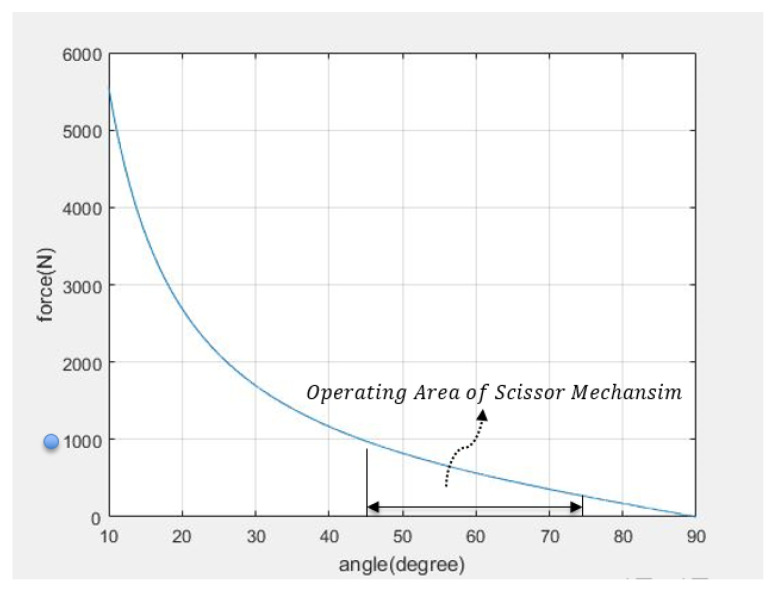
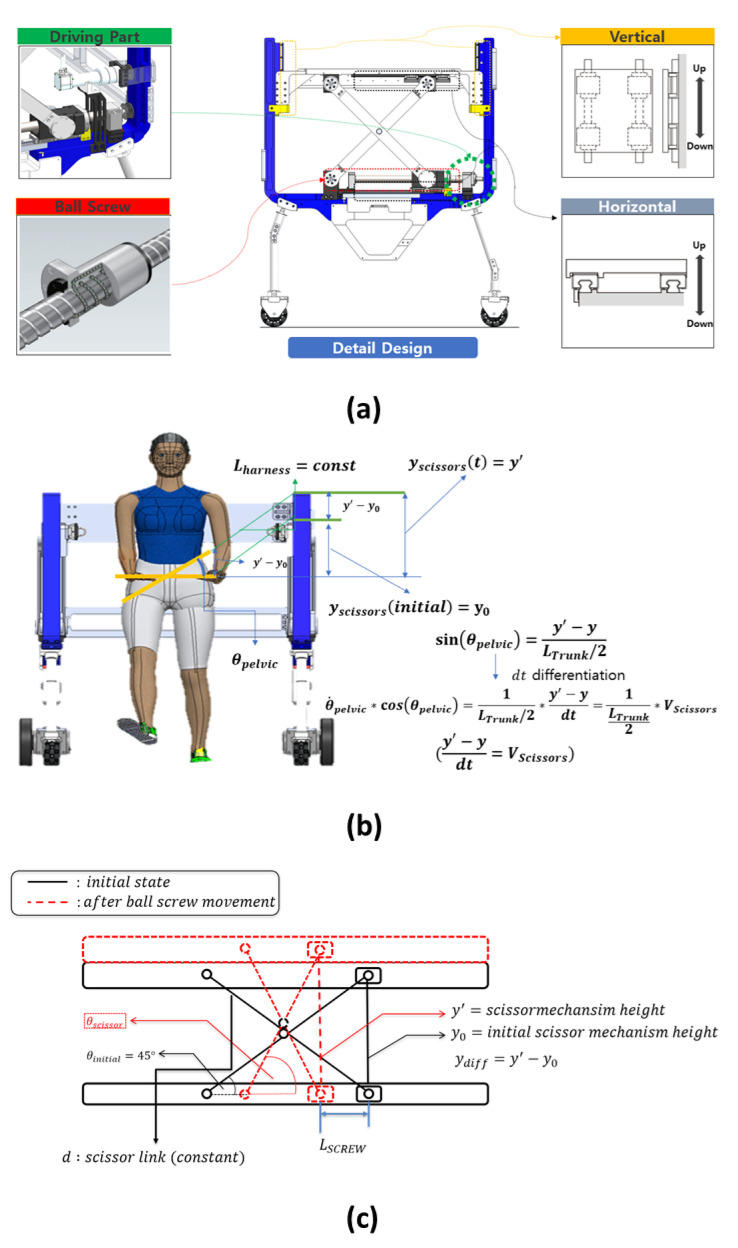
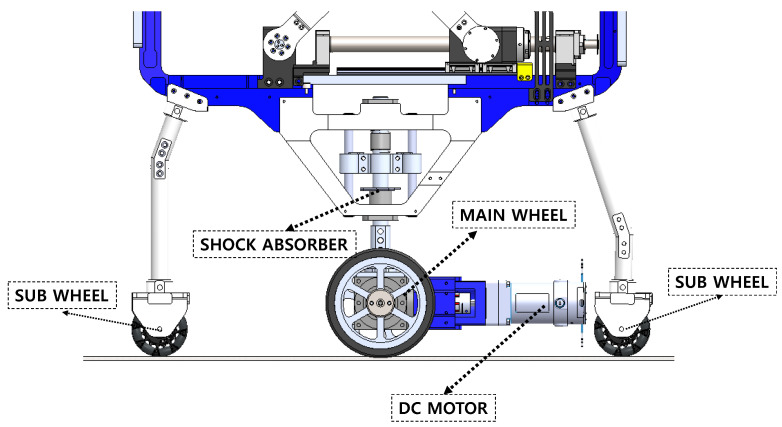
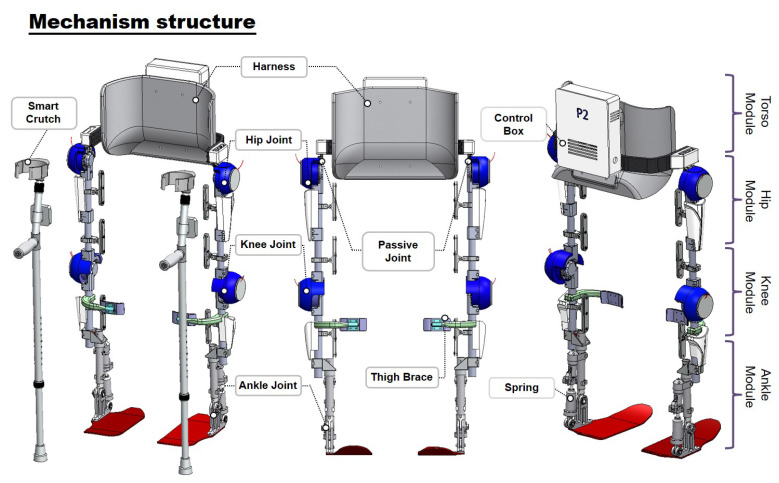
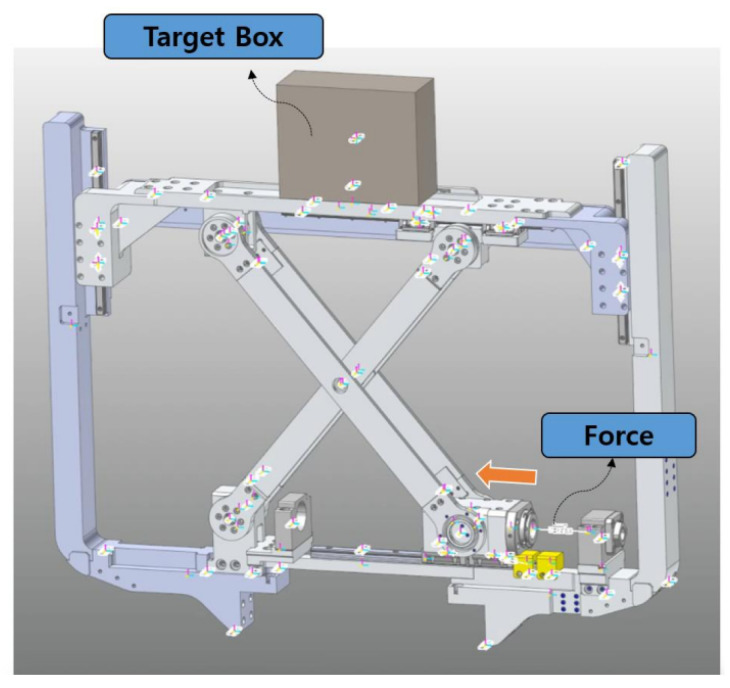
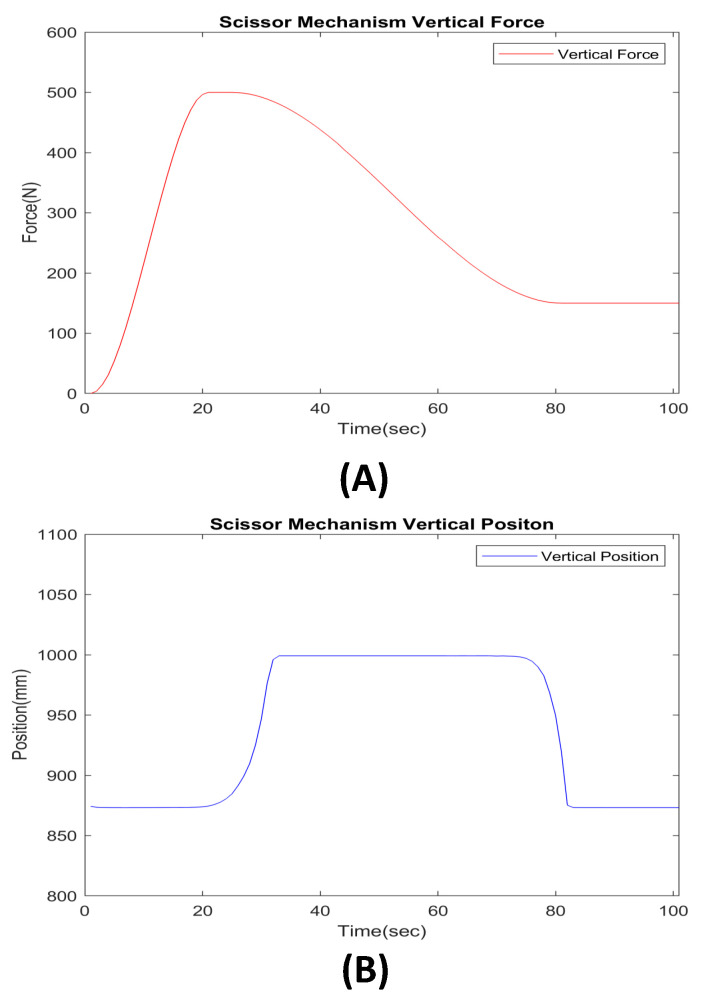
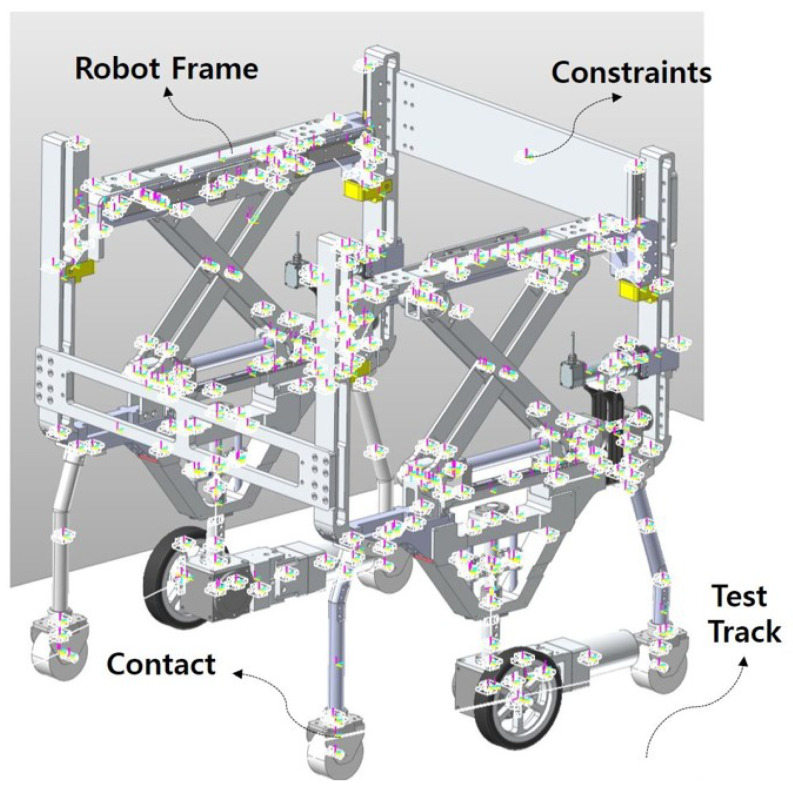
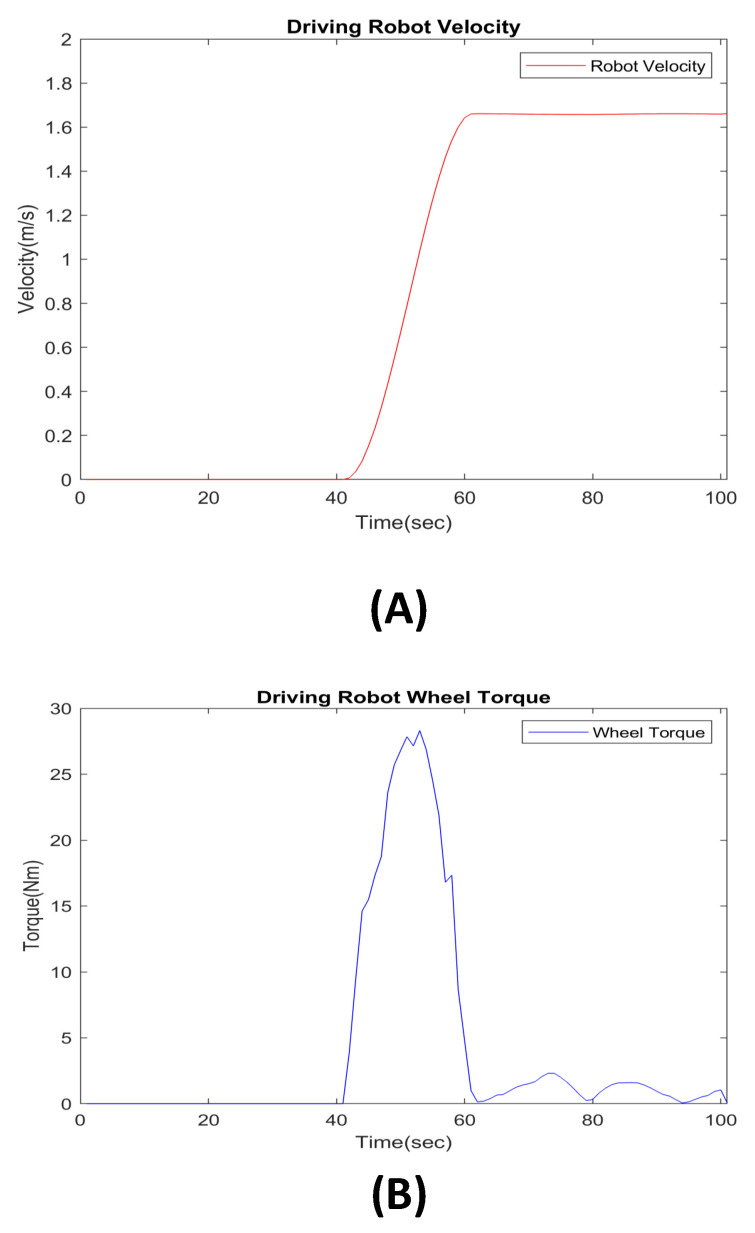
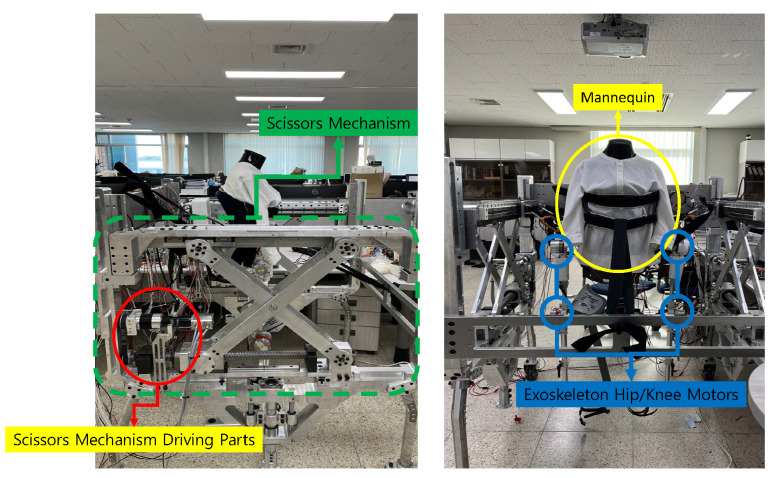
In this work, we present the overground prototype gait-rehabilitation robot for using motion assistance and training for paralyzed patients. In contrast to the existing gait-rehabilitation robots, which focus on the sagittal plane motion of the hip and knee, we aim to develop a mobile-based pelvic support gait-rehabilitation system that includes a pelvic obliquity support mechanism and a lower-limb exoskeleton. To achieve this, a scissor mechanism is proposed to generate the paralyzed patient's pelvic obliquity motion and weight support. Moreover, the lower limb exoskeleton robot is integrated with the developed system to provide the patient's gait by correcting mechanical aids. We used computer-aided analysis to verify the performance of the prototype hardware itself. Through these methods, it was shown that our motor can sufficiently lift 100 kg of user weight through the scissor mechanism, and that the mobile driving wheel motor can operate at a speed of 1.6 m/s of human walking, showing that it can be used for gait rehabilitation of patients in need of a lower speed. In addition, we verified that the system drives the model by generating pelvic motion, and we verified the position controller of the integrated system, which supports the multi-degree motion by creating hip/knee/pelvic motion with a human dummy mannequin and systems. We believe that the proposed system can help address the complex rehabilitation motion assistance and training of paralyzed patients.
在这项工作中,我们展示了一款用于为瘫痪患者提供运动辅助和训练的地面原型步态康复机器人。与现有的专注于髋关节和膝关节矢状面运动的步态康复机器人不同,我们旨在开发一种基于移动的骨盆支撑步态康复系统,该系统包括骨盆倾斜支撑机构和下肢外骨骼。为了实现这一目标,提出了一种剪刀机构来产生瘫痪患者的骨盆倾斜运动和重量支撑。此外,下肢外骨骼机器人与开发的系统集成,通过纠正机械辅助来为患者提供步态。我们使用计算机辅助分析来验证原型硬件本身的性能。通过这些方法,证明了我们的电机可以通过剪刀机构充分提升 100 公斤的用户重量,并且移动驱动轮电机可以以 1.6 米/秒的人类步行速度运行,表明它可以用于需要较低速度的患者的步态康复。此外,我们验证了系统通过产生骨盆运动来驱动模型,并且验证了集成系统的位置控制器,该控制器通过使用人体假人模型和系统来创建髋/膝/骨盆运动来支持多自由度运动。我们相信,所提出的系统可以帮助解决瘫痪患者复杂的康复运动辅助和训练问题。