Department of Physical Therapy, Human Health Sciences, Kyoto University Graduate School of Medicine, Kyoto, Japan.
Department of Pediatrics, Kyoto University Graduate School of Medicine, Kyoto, Japan.
J Neuroeng Rehabil. 2020 Jul 3;17(1):87. doi: 10.1186/s12984-020-00712-3.
Recently, rehabilitation robots are expected to improve the gait of cerebral palsy (CP) children. However, only few previous studies have reported the kinematic and kinetic changes by using wearable exoskeleton robots. The aim of this study was to investigate the change in gait parameters in CP children by training with the wearable robot-assisted gait training.
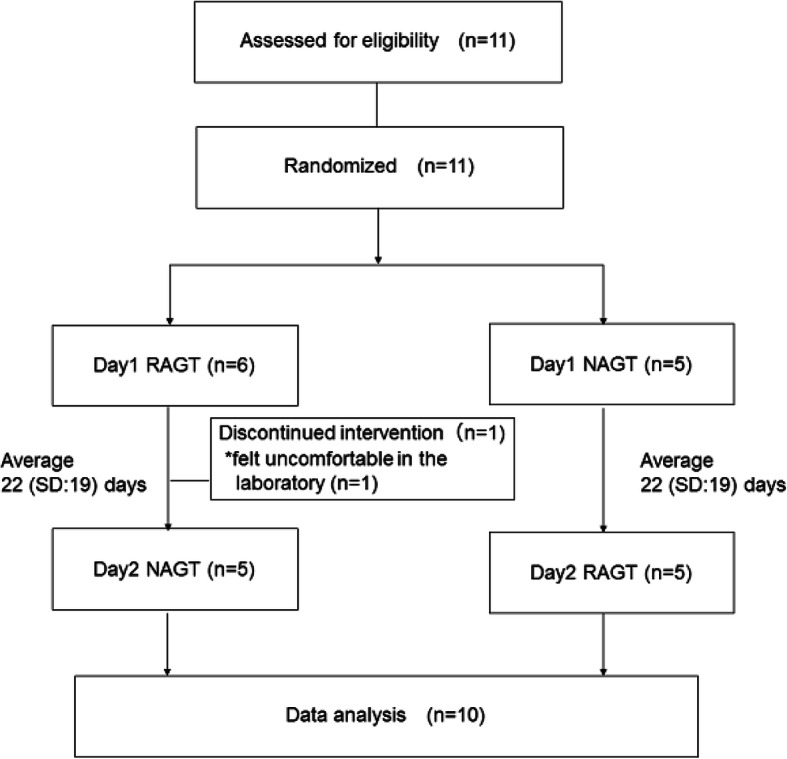
10 spastic CP children with Gross Motor Function Classification Scale levels I-III completed a sham-controlled crossover randomized trial. Robot-assisted gait training (RAGT) and non-assisted gait training (NAGT) were performed on the treadmill with the Honda Walking Assist (HWA) in two different days. To examine the carry-over effect from treadmill walking to overground walking, participants also performed 5.5 m overground-walks without the HWA before and after treadmill training (pre- and post-trial). During treadmill walking, peak of both hip and knee angles were measured. Also, we calculated the limb symmetry of hip range of motion. In addition, gait speed and ground reaction force were measured in overground trials.
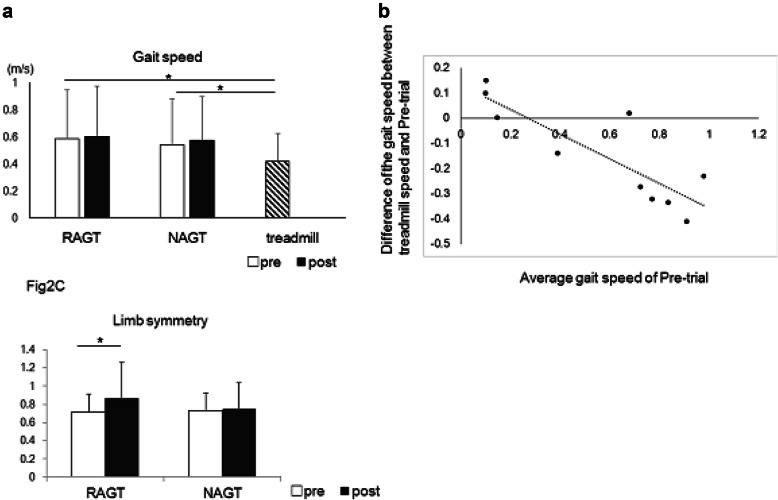
The maximum hip angle on the limb with fewer hip movements, which was defined as the affected limb, showed a significant interaction between ASSIST (RAGT and NAGT) and TIME (pre- and post-trial) (p < 0.05). Limb symmetry significantly improved after RAGT (p < 0.05), but not in NAGT. Furthermore, the affected limb showed a significant increase in the positive peak of the anterior-posterior ground reaction force during 70-100% of the gait cycle (p < 0.05). However, there was no change in gait speed.
By assisting the both hip movements with the HWA, maximum hip flexion and extension angle of the affected limb improved. Also, limb symmetry and propulsion force of the affected limb improved. Our results suggest that assisting both hip movements with the HWA might be an effective method for improving gait in CP children.
UMIN-CTR, UMIN000030667. Registered 3 January 2018, https://upload.umin.ac.jp/cgi-open-bin/ctr_e/ctr_view.cgi?recptno=R000033737.
最近,康复机器人有望改善脑瘫(CP)儿童的步态。然而,仅有少数先前的研究报告了使用可穿戴式外骨骼机器人的运动学和动力学变化。本研究的目的是通过使用可穿戴机器人辅助步态训练来研究 CP 儿童的步态参数变化。
10 名痉挛型 CP 儿童(粗大运动功能分级量表 I-III 级)完成了假对照交叉随机试验。在本田步行辅助器(HWA)的跑步机上分别进行机器人辅助步态训练(RAGT)和非辅助步态训练(NAGT),在两天内进行两种不同的训练。为了检查从跑步机步行到地面步行的延续效果,参与者在跑步机训练前后也进行了 5.5 米无 HWA 的地面步行(试验前和试验后)。在跑步机步行期间,测量了髋关节和膝关节的最大角度。此外,我们还计算了髋关节运动范围的肢体对称性。此外,在地面试验中测量了步态速度和地面反作用力。
髋关节运动较少的肢体(定义为患侧)的最大髋关节角度在辅助(RAGT 和 NAGT)和时间(试验前和试验后)之间存在显著的交互作用(p<0.05)。RAGT 后肢体对称性显著改善(p<0.05),但 NAGT 后无改善。此外,患侧在步态周期的 70-100%时前向后地面反作用力的正峰值显著增加(p<0.05)。然而,步态速度没有变化。
通过 HWA 辅助双侧髋关节运动,患侧髋关节的最大屈曲和伸展角度得到改善。此外,患侧肢体的肢体对称性和推进力也得到改善。我们的结果表明,通过 HWA 辅助双侧髋关节运动可能是改善 CP 儿童步态的有效方法。
UMIN-CTR,UMIN000030667。于 2018 年 1 月 3 日注册,https://upload.umin.ac.jp/cgi-open-bin/ctr_e/ctr_view.cgi?recptno=R000033737。