School of Transportation and Logistics Engineering, Wuhan University of Technology, Wuhan 430063, China.
National NC System Engineering Research Center, Huazhong University of Science and Technology, Wuhan 430074, China.
Sensors (Basel). 2022 Apr 22;22(9):3216. doi: 10.3390/s22093216.
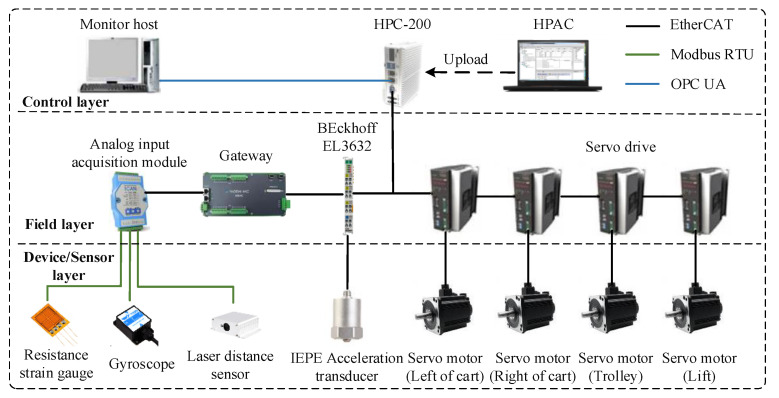
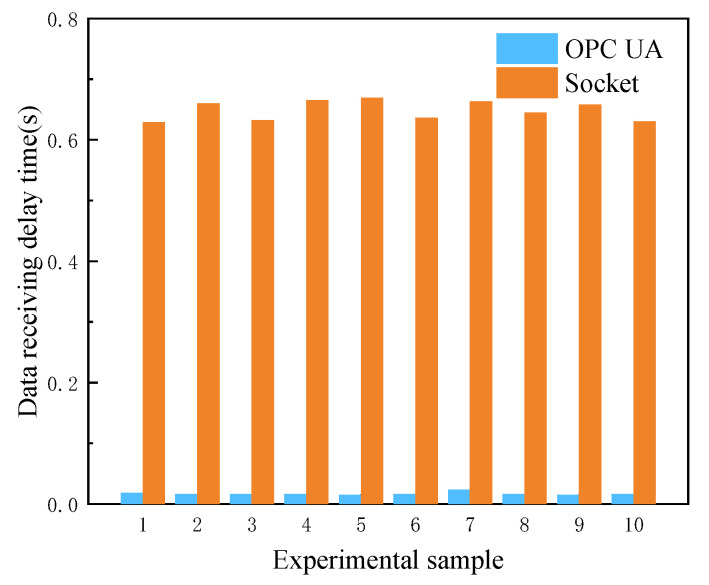
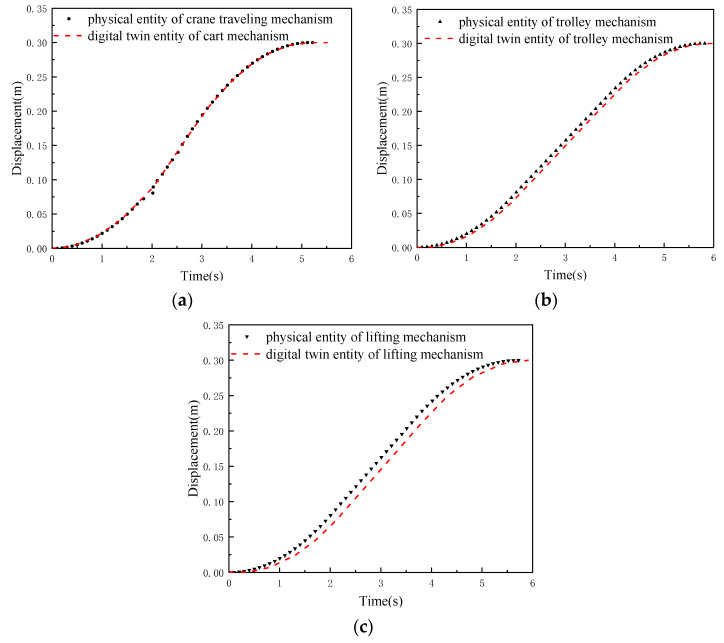
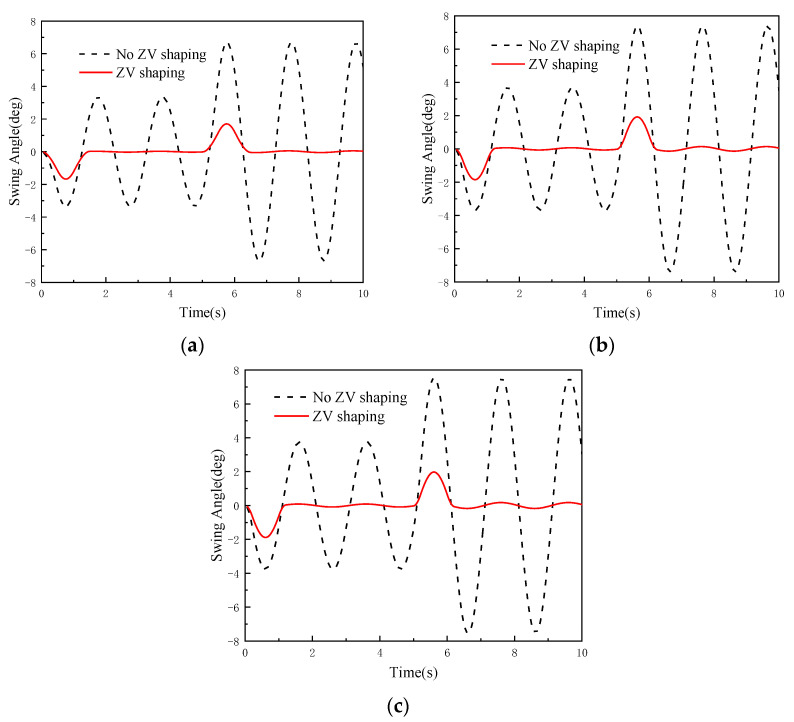
To address the problems of the lack of an online data simulation test environment, the poor openness of data collection, and the low degree of data visualization in the online control process of port cranes, an operation state monitoring system framework for port cranes based on digital twins is proposed. In this framework, the digital twin port crane is used as the core, and the multi-sensor data acquisition method, OPC UA information model, and plug-in programming method are combined to realize multi-source heterogeneous virtual and real data fusion. The digital twin crane monitoring system based on this framework can fulfil the following functions: crane historical operation process reproduction, control program simulation testing, synchronous mapping simulation, and remote control. In order to verify the proposed method, a digital twin-based physical platform for monitoring a rail-mounted gantry crane (RMGC) was built, in which a virtual test of anti-swing control and a digital twin monitoring experiment were carried out. The results show that the virtual RMGC can test the control algorithm and map the movement process of the physical RMGC, and the crane operation monitoring system has high real-time performance and good visualization effect. In addition, the remote control of the software platform is accurate and effective.
为了解决港口起重机在线控制过程中缺乏在线数据模拟测试环境、数据采集开放性差以及数据可视化程度低的问题,提出了一种基于数字孪生的港口起重机运行状态监测系统框架。在该框架中,数字孪生港口起重机作为核心,结合多传感器数据采集方法、OPC UA 信息模型和插件编程方法,实现多源异构虚实数据融合。基于该框架的数字孪生起重机监测系统可以实现起重机历史运行过程再现、控制程序模拟测试、同步映射模拟和远程控制等功能。为了验证所提出的方法,构建了基于数字孪生的轨道龙门起重机(RMGC)物理监测平台,进行了反摆控制的虚拟测试和数字孪生监测实验。结果表明,虚拟 RMGC 可以测试控制算法并映射物理 RMGC 的运动过程,起重机运行监测系统具有较高的实时性和良好的可视化效果。此外,软件平台的远程控制准确有效。