Engdahl Susannah M, Acuña Samuel A, King Erica L, Bashatah Ahmed, Sikdar Siddhartha
Department of Bioengineering, George Mason University, Fairfax, VA, United States.
Center for Adaptive Systems of Brain-Body Interactions, George Mason University, Fairfax, VA, United States.
Front Bioeng Biotechnol. 2022 May 4;10:876836. doi: 10.3389/fbioe.2022.876836. eCollection 2022.
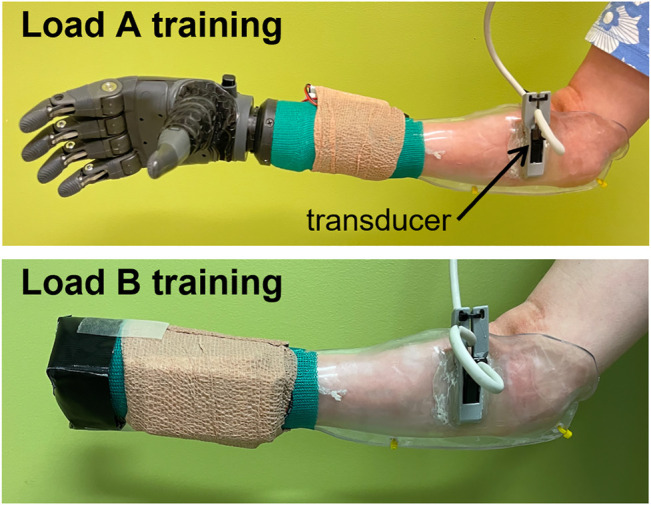
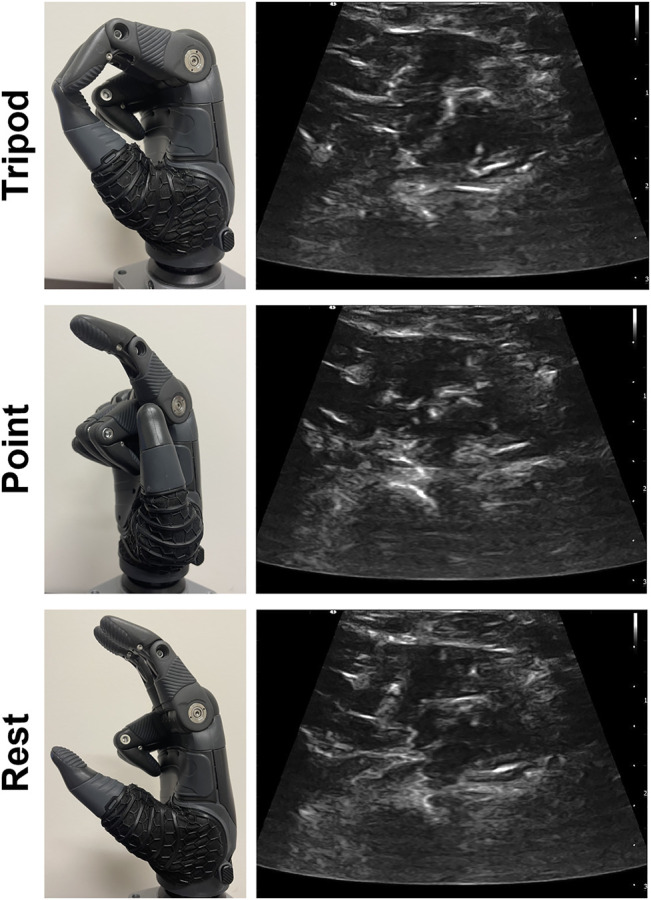
Ultrasound-based sensing of muscle deformation, known as sonomyography, has shown promise for accurately classifying the intended hand grasps of individuals with upper limb loss in offline settings. Building upon this previous work, we present the first demonstration of real-time prosthetic hand control using sonomyography to perform functional tasks. An individual with congenital bilateral limb absence was fitted with sockets containing a low-profile ultrasound transducer placed over forearm muscle tissue in the residual limbs. A classifier was trained using linear discriminant analysis to recognize ultrasound images of muscle contractions for three discrete hand configurations (rest, tripod grasp, index finger point) under a variety of arm positions designed to cover the reachable workspace. A prosthetic hand mounted to the socket was then controlled using this classifier. Using this real-time sonomyographic control, the participant was able to complete three functional tasks that required selecting different hand grasps in order to grasp and move one-inch wooden blocks over a broad range of arm positions. Additionally, these tests were successfully repeated without retraining the classifier across 3 hours of prosthesis use and following simulated donning and doffing of the socket. This study supports the feasibility of using sonomyography to control upper limb prostheses in real-world applications.
基于超声的肌肉变形传感技术,即超声肌动图,已显示出在离线环境中准确分类上肢缺失个体预期手部抓握动作的潜力。在此前工作的基础上,我们首次展示了利用超声肌动图进行实时假手控制以执行功能任务。一名先天性双侧肢体缺失的个体佩戴了带有低调超声换能器的套筒,该换能器放置在残肢的前臂肌肉组织上方。使用线性判别分析训练了一个分类器,以识别在各种旨在覆盖可达工作空间的手臂位置下,三种离散手部配置(休息、三脚架抓握、食指指向)时肌肉收缩的超声图像。然后使用该分类器控制安装在套筒上的假手。通过这种实时超声肌动图控制,参与者能够完成三项功能任务,这些任务需要选择不同的手部抓握动作,以便在广泛的手臂位置上抓取并移动一英寸长的木块。此外,在3小时的假肢使用过程中以及模拟套筒的穿戴和取下后,无需重新训练分类器,这些测试就能成功重复进行。这项研究支持了在实际应用中使用超声肌动图控制上肢假肢的可行性。