College of Computer and Control Engineering, Qiqihar University, Qiqihar, China.
Comput Intell Neurosci. 2022 Jun 2;2022:2540546. doi: 10.1155/2022/2540546. eCollection 2022.
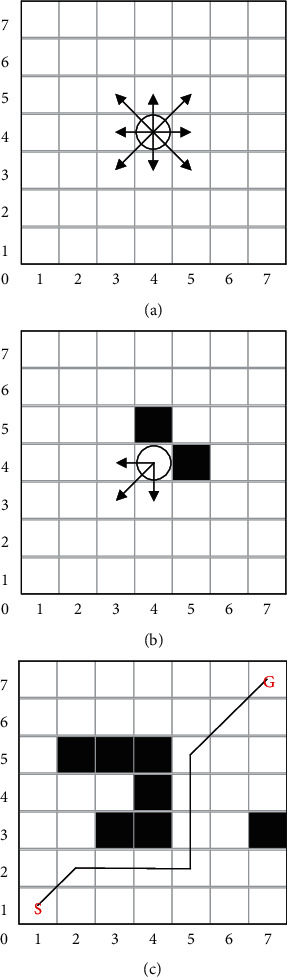
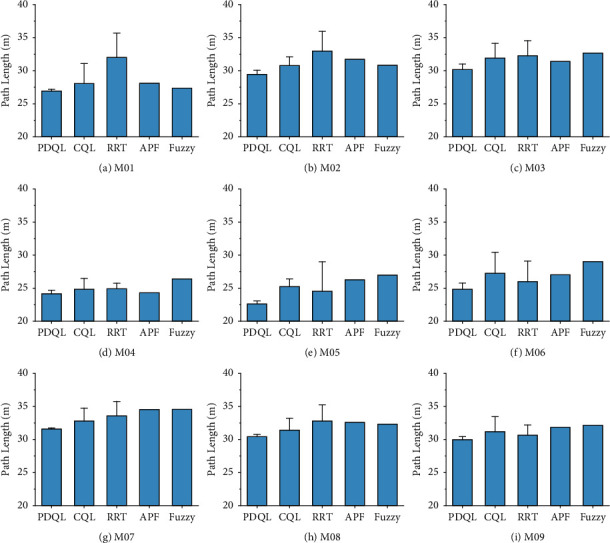
The path-planning approach plays an important role in determining how long the mobile robots can travel. To solve the path-planning problem of mobile robots in an unknown environment, a potential and dynamic Q-learning (PDQL) approach is proposed, which combines Q-learning with the artificial potential field and dynamic reward function to generate a feasible path. The proposed algorithm has a significant improvement in computing time and convergence speed compared to its classical counterpart. Experiments undertaken on simulated maps confirm that the PDQL when used for the path-planning problem of mobile robots in an unknown environment outperforms the state-of-the-art algorithms with respect to two metrics: path length and turning angle. The simulation results show the effectiveness and practicality of the proposal for mobile robot path planning.
路径规划方法在确定移动机器人的行驶时间方面起着重要作用。为了解决移动机器人在未知环境中的路径规划问题,提出了一种势场动态 Q 学习(PDQL)方法,该方法将 Q 学习与人工势场和动态奖励函数相结合,生成可行路径。与经典方法相比,所提出的算法在计算时间和收敛速度方面有了显著的提高。在模拟地图上进行的实验证实,在未知环境中用于移动机器人路径规划的 PDQL 在两个指标方面优于最先进的算法:路径长度和转弯角度。仿真结果表明了该方法在移动机器人路径规划中的有效性和实用性。