Wilhelm Nikolas Jakob, Haddadin Sami, Lang Jan Josef, Micheler Carina, Hinterwimmer Florian, Reiners Anselm, Burgkart Rainer, Glowalla Claudio
Department of Orthopedics and Sports Orthopedics, Klinikum rechts der Isar, School of Medicine, 80333 Munich, Germany.
Munich Institute of Robotics and Machine Intelligence, Department of Electrical and Computer Engineering, Technical University of Munich, 80333 Munich, Germany.
Sensors (Basel). 2022 Jun 25;22(13):4804. doi: 10.3390/s22134804.
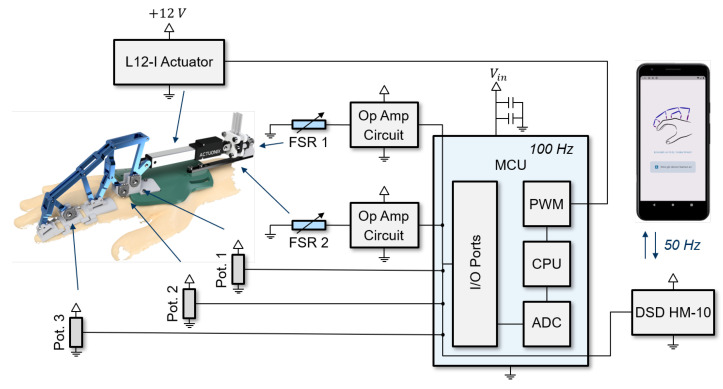
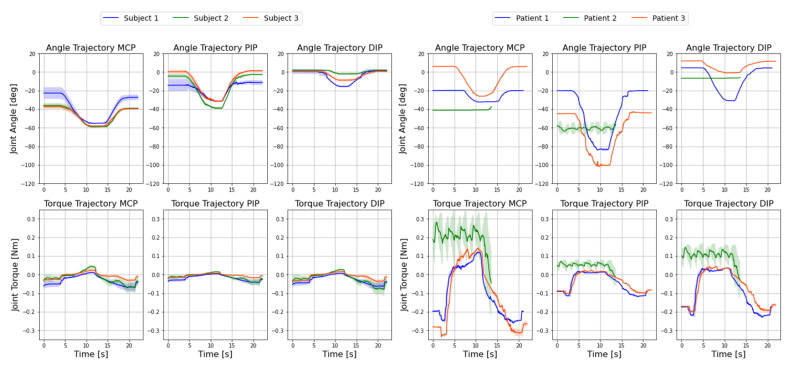
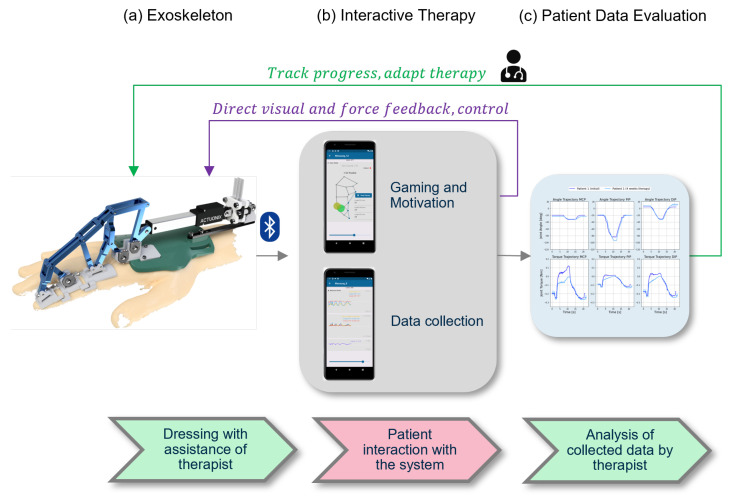
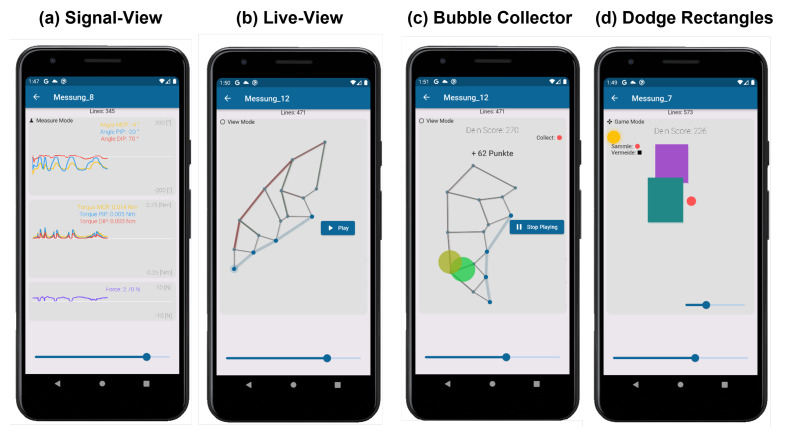
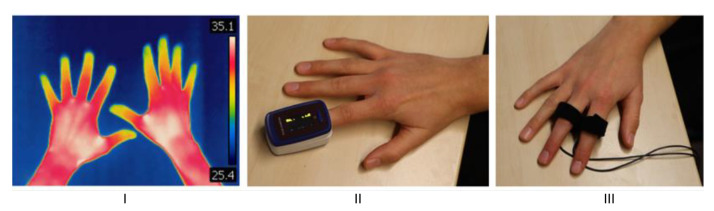
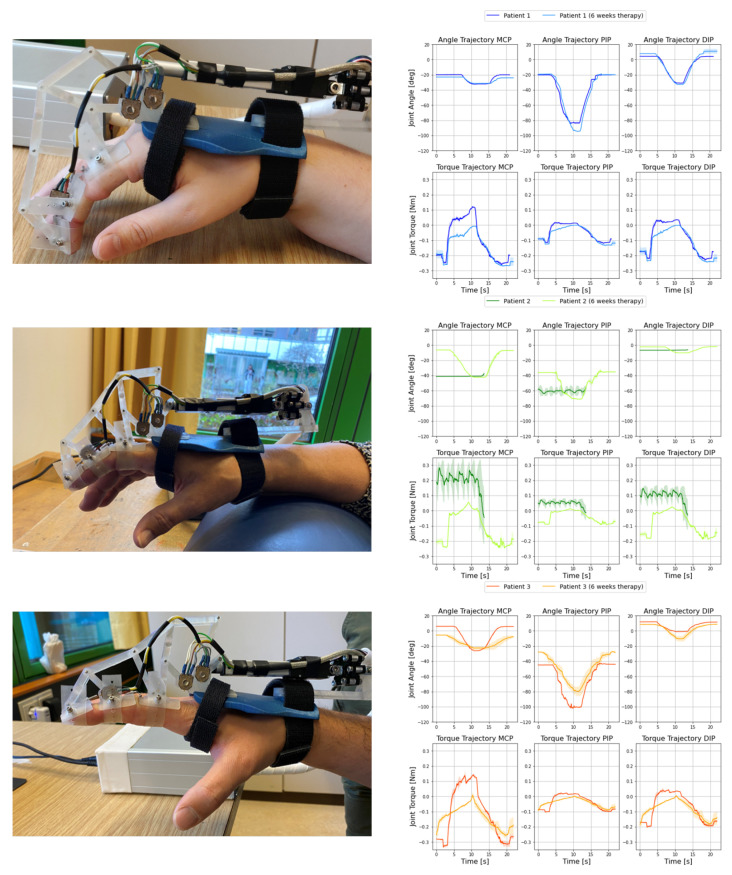
This paper presents the application of an adaptive exoskeleton for finger rehabilitation. The system consists of a force-controlled exoskeleton of the finger and wireless coupling to a mobile application for the rehabilitation of complex regional pain syndrome (CRPS) patients. The exoskeleton has sensors for motion detection and force control as well as a wireless communication module. The proposed mobile application allows to interactively control the exoskeleton, store collected patient-specific data, and motivate the patient for therapy by means of gamification. The exoskeleton was applied to three CRPS patients over a period of six weeks. We present the design of the exoskeleton, the mobile application with its game content, and the results of the performed preliminary patient study. The exoskeleton system showed good applicability; recorded data can be used for objective therapy evaluation.
本文介绍了一种用于手指康复的自适应外骨骼的应用。该系统由手指的力控外骨骼以及与用于复杂区域疼痛综合征(CRPS)患者康复的移动应用程序的无线耦合组成。外骨骼具有用于运动检测和力控制的传感器以及无线通信模块。所提出的移动应用程序允许交互式控制外骨骼、存储收集的患者特定数据,并通过游戏化激励患者进行治疗。该外骨骼在六周的时间内应用于三名CRPS患者。我们展示了外骨骼的设计、具有游戏内容的移动应用程序以及所进行的初步患者研究的结果。外骨骼系统显示出良好的适用性;记录的数据可用于客观的治疗评估。