Kabanov Aleksey, Kramar Vadim, Lipko Ivan, Dementiev Kirill
Robotics and Intelligent Control Systems Laboratory, Sevastopol State University, 299053 Sevastopol, Russia.
Sensors (Basel). 2022 Jul 4;22(13):5038. doi: 10.3390/s22135038.
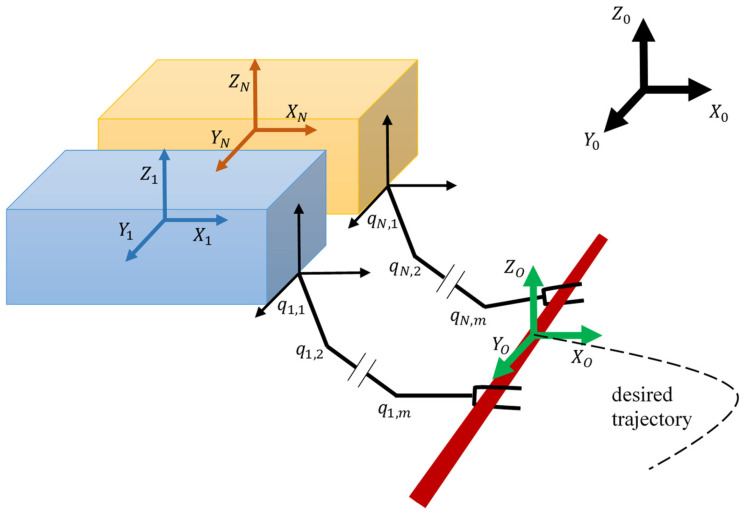
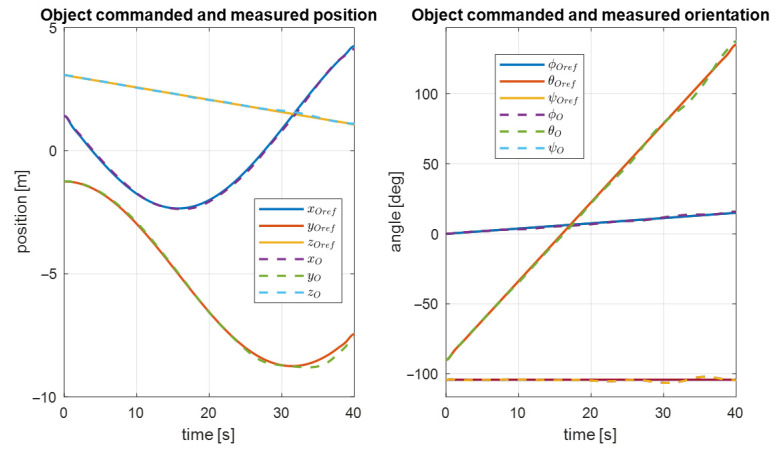
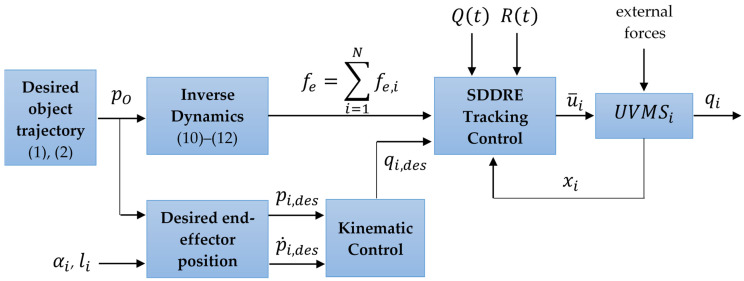
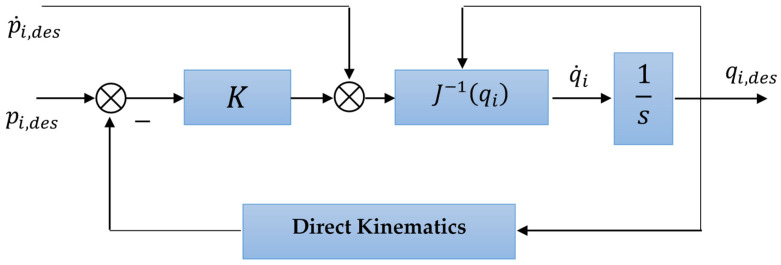
The paper considers the problem of cooperative control synthesis for a complex of N underwater vehicle-manipulator systems (UVMS) to perform the work of moving a cargo along a given trajectory. Here, we used the approach based on the representation of nonlinear dynamics models in the form of state space with state-dependent coefficients (SDC-form). That allowed us to apply methods of suboptimal control with feedback based on the state-dependent differential Riccati equation (SDDRE) solution at a finite time interval, providing the change in control intensity with the transient effect of the system matrices in SDC form. The paper reveals two approaches to system implementation: a general controller for the whole system and a set of N independent subcontrollers for UVMSs. The results of both approaches are similar; however, for the systems with a small number of manipulators, the common structure is recommended, and for the systems with a large number of manipulators, the approach with independent subcontrollers may be more acceptable. The proposed method of cooperative control was tested on the task of cooperative control for two UVMSs with six-link manipulators Orion 7R. The simulation results are presented in the article and show the effectiveness of the proposed method.
本文考虑了由N个水下机器人-机械手系统(UVMS)组成的复合体进行货物沿给定轨迹移动工作的协同控制综合问题。在此,我们采用了基于具有状态依赖系数(SDC形式)的状态空间形式的非线性动力学模型表示的方法。这使我们能够在有限时间间隔内应用基于状态依赖微分黎卡提方程(SDDRE)解的带反馈的次优控制方法,考虑到SDC形式下系统矩阵的瞬态效应来改变控制强度。本文揭示了两种系统实现方法:一种是针对整个系统的通用控制器,另一种是为UVMS配备的一组N个独立子控制器。两种方法的结果相似;然而,对于机械手数量较少的系统,建议采用通用结构,而对于机械手数量较多的系统,采用独立子控制器的方法可能更合适。所提出的协同控制方法在两个配备六连杆机械手Orion 7R的UVMS的协同控制任务上进行了测试。文章给出了仿真结果,表明了所提方法的有效性。