Cognitive Architecture for Collaborative Technologies Unit, Istituto Italiano di Tecnologia (IIT), Genoa, Italy.
Department of Informatics, Bioengineering Robotics, and System Engineering, University of Genoa, Genoa, Italy.
Exp Brain Res. 2022 Sep;240(9):2285-2298. doi: 10.1007/s00221-022-06409-4. Epub 2022 Jul 25.
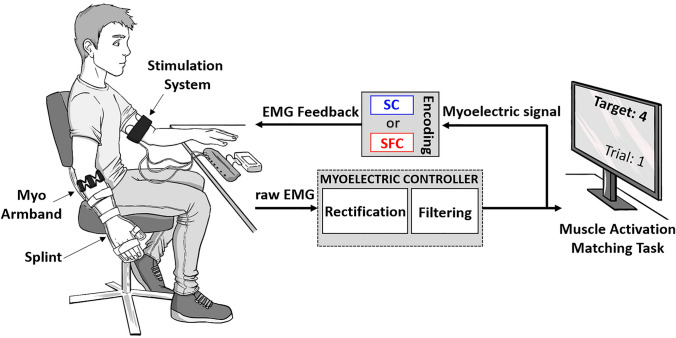
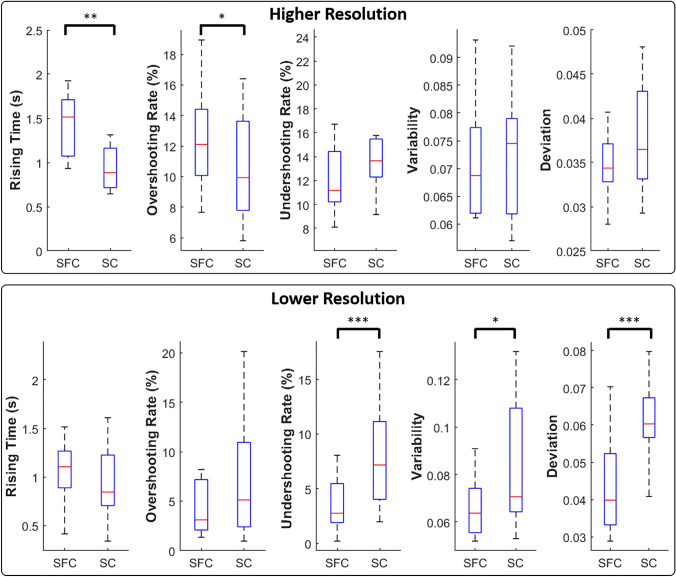
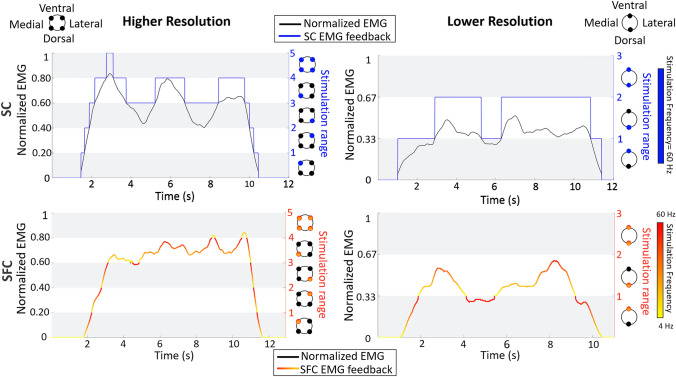
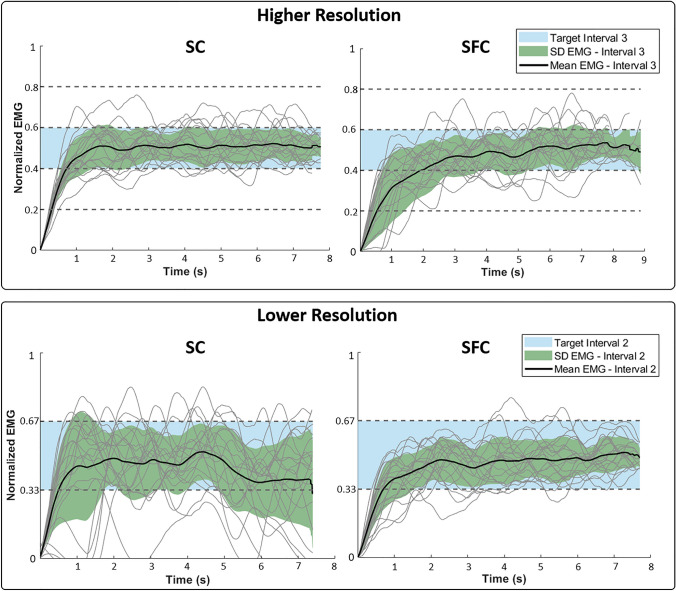
Electrotactile stimulation has been commonly used in human-machine interfaces to provide feedback to the user, thereby closing the control loop and improving performance. The encoding approach, which defines the mapping of the feedback information into stimulation profiles, is a critical component of an electrotactile interface. Ideally, the encoding will provide a high-fidelity representation of the feedback variable while being easy to perceive and interpret by the subject. In the present study, we performed a closed-loop experiment wherein discrete and continuous coding schemes are combined to exploit the benefits of both techniques. Subjects performed a muscle activation-matching task relying solely on electrotactile feedback representing the generated myoelectric signal (EMG). In particular, we investigated the performance of two different coding schemes (spatial and spatial combined with frequency) at two feedback resolutions (low: 3 and high: 5 intervals). In both schemes, the stimulation electrodes were placed circumferentially around the upper arm. The magnitude of the normalized EMG was divided into intervals, and each electrode was associated with one interval. When the generated EMG entered one of the intervals, the associated electrode started stimulating. In the combined encoding, the additional frequency modulation of the active electrode also indicated the momentary magnitude of the signal within the interval. The results showed that combined coding decreased the undershooting rate, variability and absolute deviation when the resolution was low but not when the resolution was high, where it actually worsened the performance. This demonstrates that combined coding can improve the effectiveness of EMG feedback, but that this effect is limited by the intrinsic variability of myoelectric control. Our findings, therefore, provide important insights as well as elucidate limitations of the information encoding methods when using electrotactile stimulation to convey a feedback signal characterized by high variability (EMG biofeedback).
电触觉刺激已广泛应用于人机接口,为用户提供反馈,从而闭合控制回路并提高性能。编码方法定义了将反馈信息映射到刺激模式的方式,是电触觉接口的关键组成部分。理想情况下,编码将提供反馈变量的高保真表示,同时易于被主体感知和解释。在本研究中,我们进行了一项闭环实验,其中结合使用离散和连续编码方案,以利用这两种技术的优势。实验中,主体仅依靠代表生成肌电信号(EMG)的电触觉反馈来执行肌肉激活匹配任务。特别地,我们研究了两种不同编码方案(空间和空间与频率相结合)在两种反馈分辨率(低:3 个区间和高:5 个区间)下的性能。在这两种方案中,刺激电极都放置在上臂周围的圆周上。将归一化 EMG 的幅度分为区间,每个电极与一个区间相关联。当生成的 EMG 进入一个区间时,相关电极开始刺激。在组合编码中,活动电极的附加频率调制也指示了区间内信号的瞬时幅度。结果表明,在分辨率较低时,组合编码降低了欠冲率、变异性和绝对偏差,但在分辨率较高时,反而会恶化性能。这表明组合编码可以提高 EMG 反馈的有效性,但这种效果受到肌电控制固有变异性的限制。因此,我们的研究结果为使用电触觉刺激来传递具有高变异性的反馈信号(EMG 生物反馈)时的信息编码方法提供了重要的见解和限制。