Ou Yangqi, Fan Yuexin, Zhang Xinglan, Lin Yanhua, Yang Weijing
College of Automation, Chongqing University, Chongqing 400044, China.
College of Computer Science and Engineering, Chongqing University of Technology, Chongqing 400054, China.
Sensors (Basel). 2022 Aug 18;22(16):6198. doi: 10.3390/s22166198.
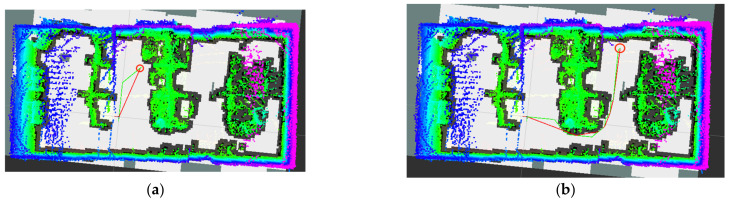
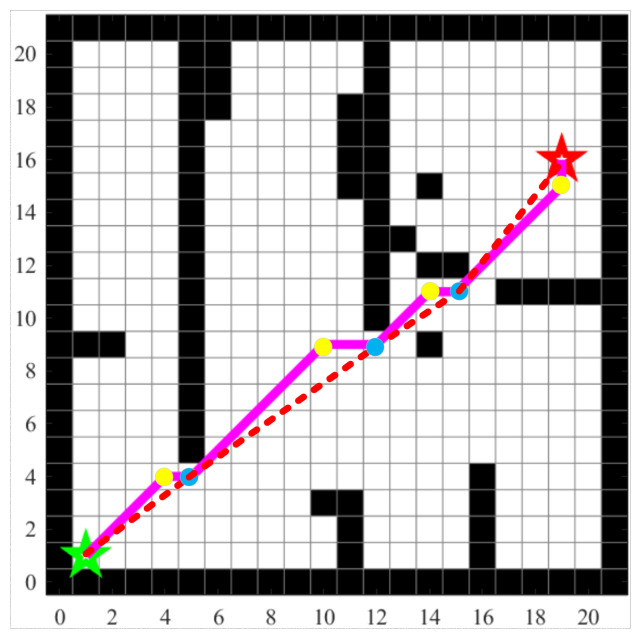
In obstacle spatial path planning, the traditional A* algorithm has the problem of too many turning points and slow search speed. With this in mind, a path planning method that improves the A* (A-Star) algorithm is proposed. The mobile robot platform was equipped with a lidar and inertial measurement unit (IMU). The Hdl_graph_slam mapping algorithm was used to construct a two-dimensional grid map, and the improved A* algorithm was used for path planning of the mobile robot. The algorithm introduced the path smoothing strategy and safety protection mechanism, and it eliminated redundant points and minimal corner points by judging whether there were obstacles in the connection of two path nodes. The algorithm effectively improved the smoothness of the path and facilitated the robot to move in the actual operation. It could avoid the wear of the robot by expanding obstacles and improving the safety performance of the robot. Subsequently, the algorithm introduced the steering cost model and the adaptive cost function to improve the search efficiency, making the search purposeful and effective. Lastly, the effectiveness of the proposed algorithm was verified by experiments. The average path search time was reduced by 13%. The average search extension node was reduced by 11%. The problems of too many turning points and slow search speed of traditional A* algorithm in path planning were improved.
在障碍物空间路径规划中,传统的A算法存在转折点过多和搜索速度慢的问题。考虑到这一点,提出了一种改进A(A-Star)算法的路径规划方法。移动机器人平台配备了激光雷达和惯性测量单元(IMU)。使用Hdl_graph_slam映射算法构建二维网格地图,并将改进的A算法用于移动机器人的路径规划。该算法引入了路径平滑策略和安全保护机制,通过判断两个路径节点的连接中是否存在障碍物来消除冗余点和最小角点。该算法有效地提高了路径的平滑度,便于机器人在实际操作中移动。它可以通过扩展障碍物来避免机器人的磨损,并提高机器人的安全性能。随后,该算法引入了转向成本模型和自适应成本函数以提高搜索效率,使搜索具有针对性和有效性。最后,通过实验验证了所提算法的有效性。平均路径搜索时间减少了13%。平均搜索扩展节点减少了11%。改进了传统A算法在路径规划中转折点过多和搜索速度慢的问题。