Institute of Systems and Robotics, Department of Electrical and Computer Engineering, University of Coimbra, 3030-290 Coimbra, Portugal.
Sensors (Basel). 2022 Sep 28;22(19):7378. doi: 10.3390/s22197378.
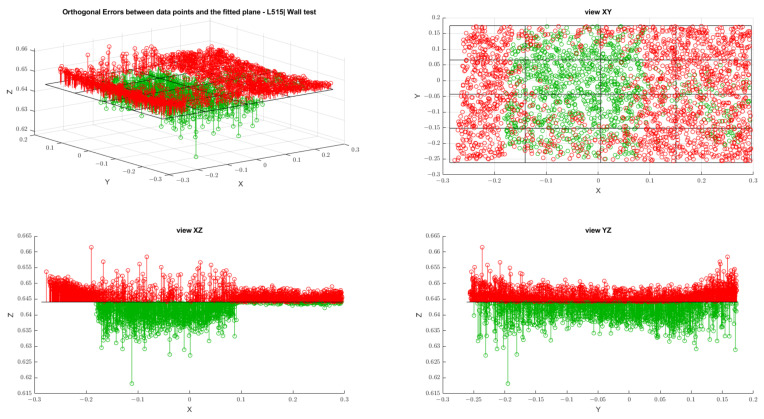
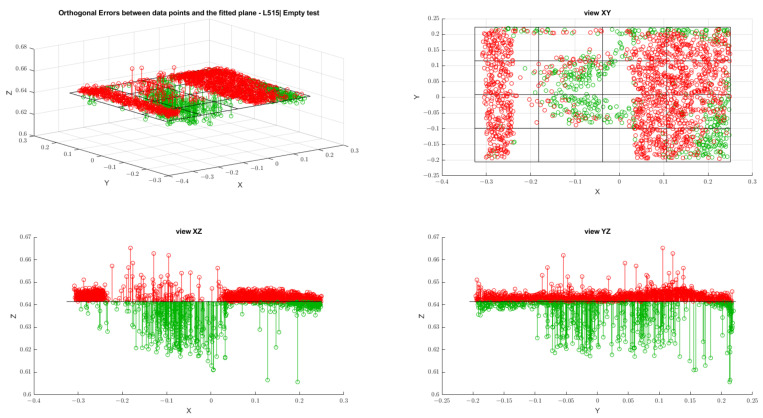
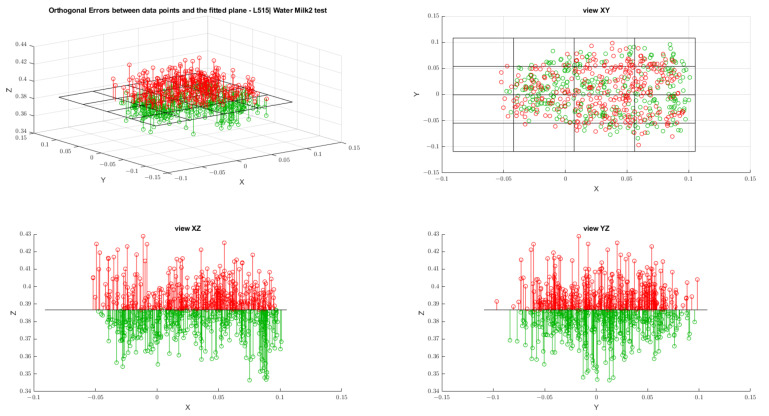
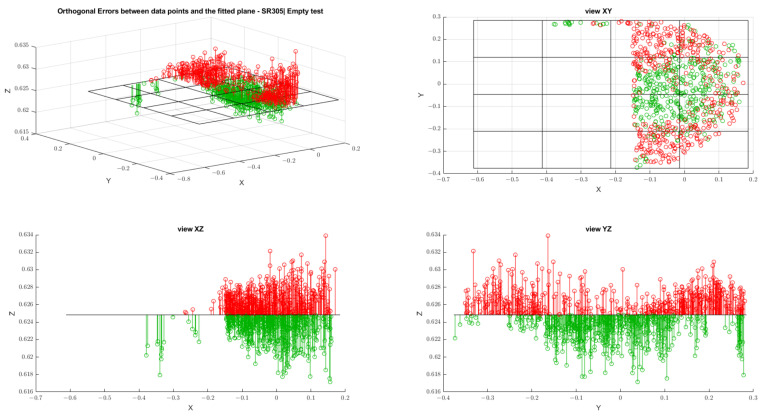
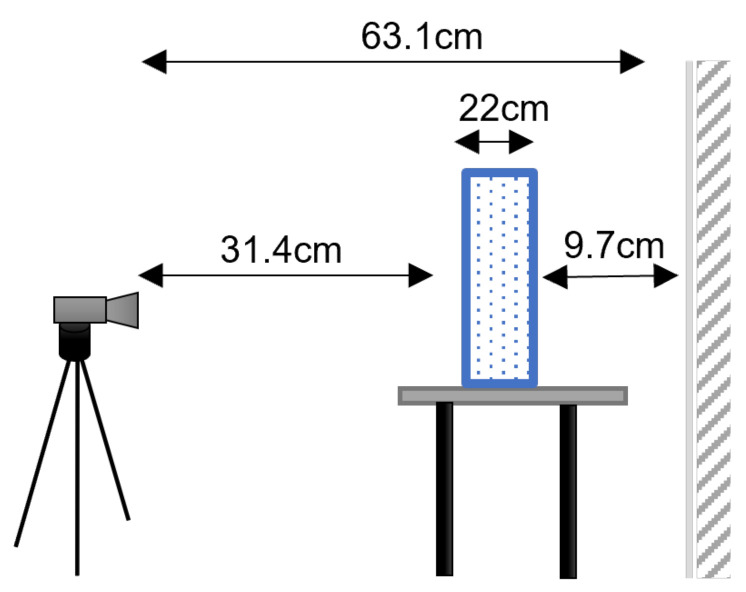
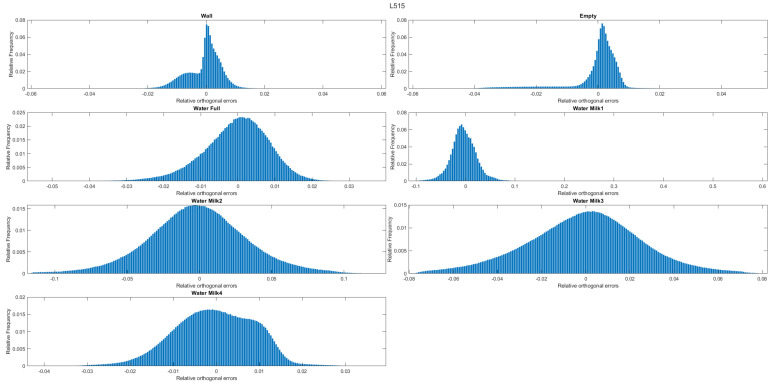
RGB-D cameras have become common in many research fields since these inexpensive devices provide dense 3D information from the observed scene. Over the past few years, the RealSense™ range from Intel has introduced new, cost-effective RGB-D sensors with different technologies, more sophisticated in both hardware and software. Models D415, SR305, and L515 are examples of successful cameras launched by Intel RealSense™ between 2018 and 2020. These three cameras are different since they have distinct operating principles. Then, their behavior concerning depth estimation while in the presence of many error sources will also be specific. For instance, semi-transparent and scattering media are expected error sources for an RGB-D sensor. The main new contribution of this paper is a full evaluation and comparison between the three Intel RealSense cameras in scenarios with transparency and translucency. We propose an experimental setup involving an aquarium and liquids. The evaluation, based on repeatability/precision and statistical distribution of the acquired depth, allows us to compare the three cameras and conclude that Intel RealSense D415 has overall the best behavior namely in what concerns the statistical variability (also known as precision or repeatability) and also in what concerns valid measurements.
RGB-D 相机在许多研究领域已经变得很常见,因为这些廉价的设备可以从观察到的场景中提供密集的 3D 信息。在过去的几年中,英特尔的 RealSense™系列推出了具有不同技术的新型、具有成本效益的 RGB-D 传感器,这些传感器在硬件和软件方面都更加复杂。D415、SR305 和 L515 是英特尔 RealSense™在 2018 年至 2020 年间推出的三款成功相机的示例。这三款相机的工作原理不同,因此它们在存在许多误差源时的深度估计行为也将是特定的。例如,半透明和散射介质是 RGB-D 传感器的预期误差源。本文的主要新贡献是在具有透明度和半透明度的场景中对这三款英特尔 RealSense 相机进行全面评估和比较。我们提出了一个涉及水族馆和液体的实验设置。基于获取深度的重复性/精度和统计分布的评估,使我们能够比较这三款相机,并得出结论,即英特尔 RealSense D415 的整体表现最佳,无论是在统计可变性(也称为精度或重复性)方面,还是在有效测量方面。