Xie Qiaolian, Meng Qiaoling, Yu Wenwei, Wu Zhiyu, Xu Rongna, Zeng Qingxin, Zhou Zhongchao, Yang Tianyi, Yu Hongliu
Institute of Rehabilitation Engineering and Technology, University of Shanghai for Science and Technology, Shanghai, China.
Shanghai Engineering Research Center of Assistive Devices, Shanghai, China.
Front Neurorobot. 2023 Feb 10;17:1047493. doi: 10.3389/fnbot.2023.1047493. eCollection 2023.
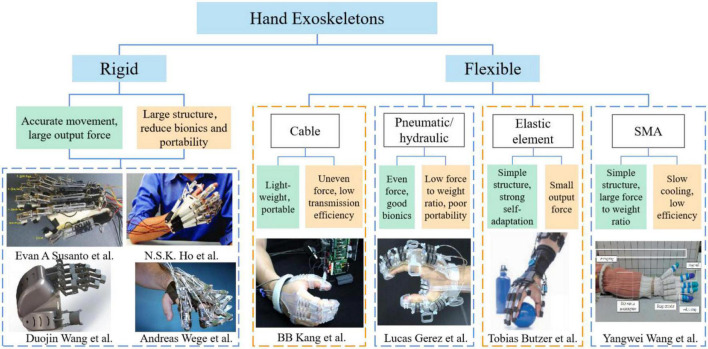
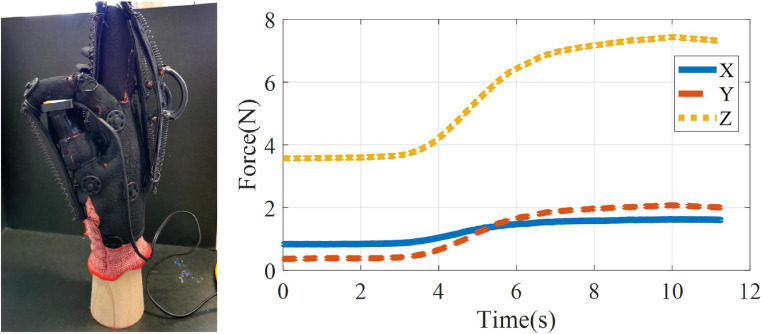
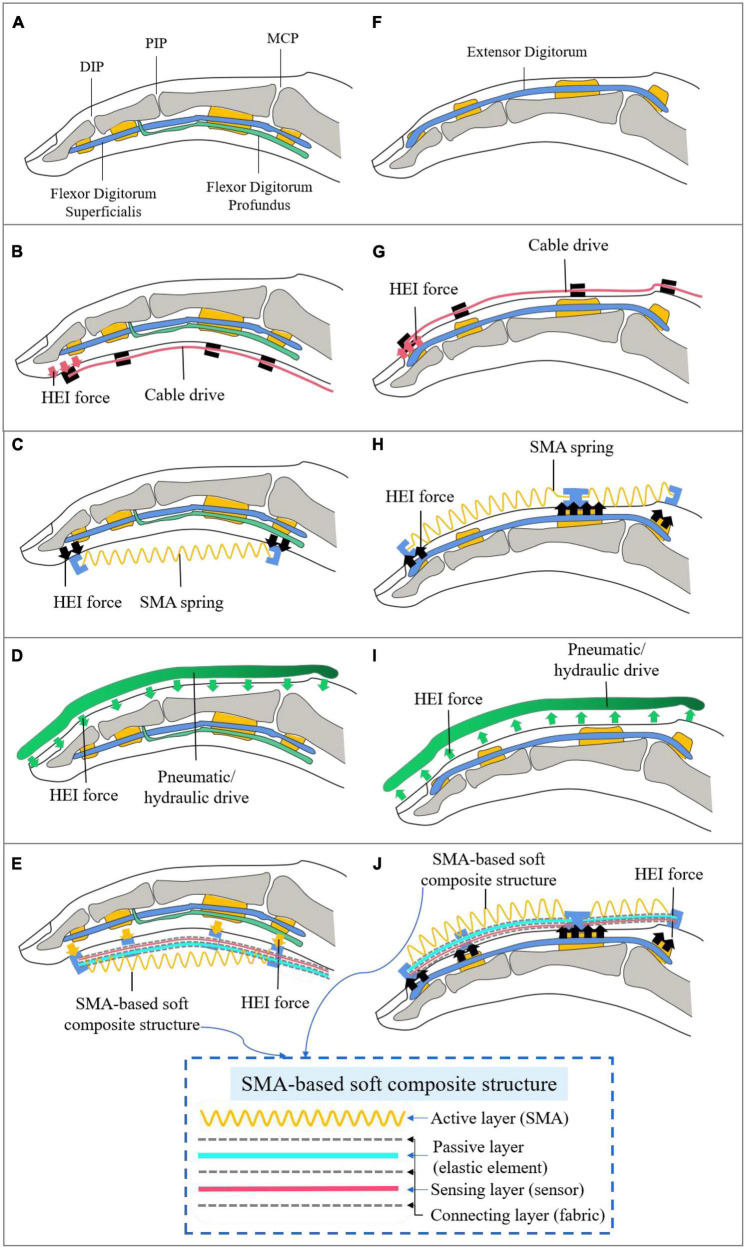
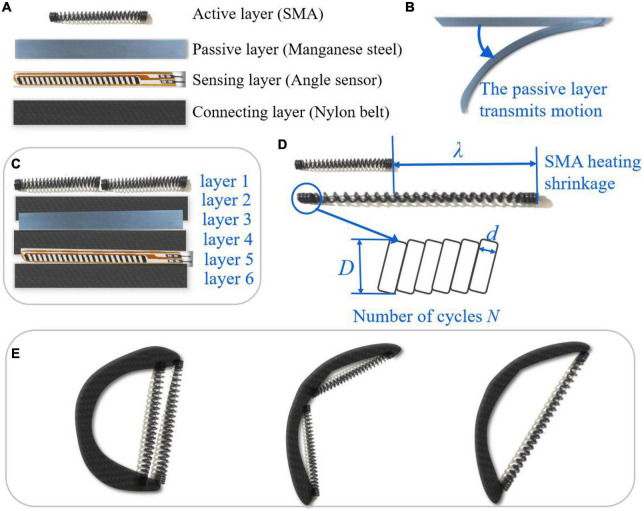
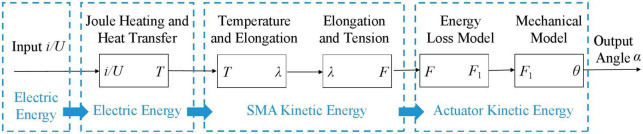
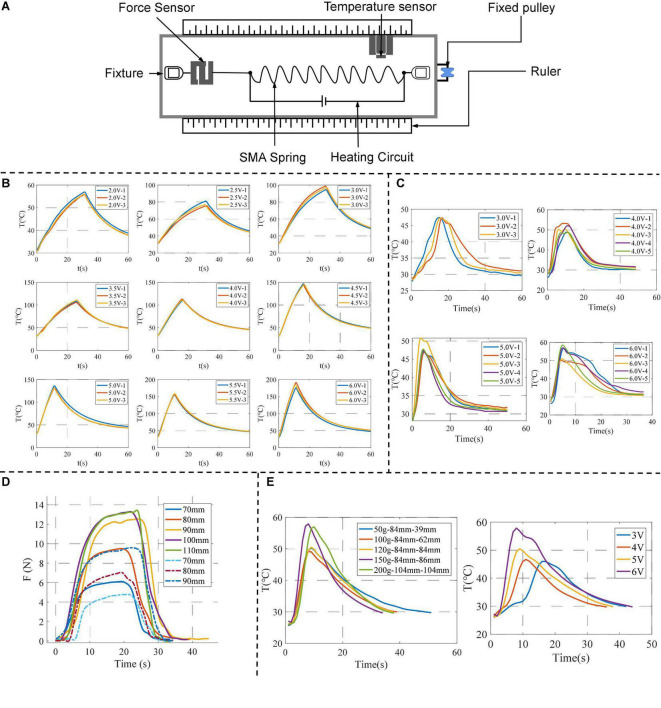
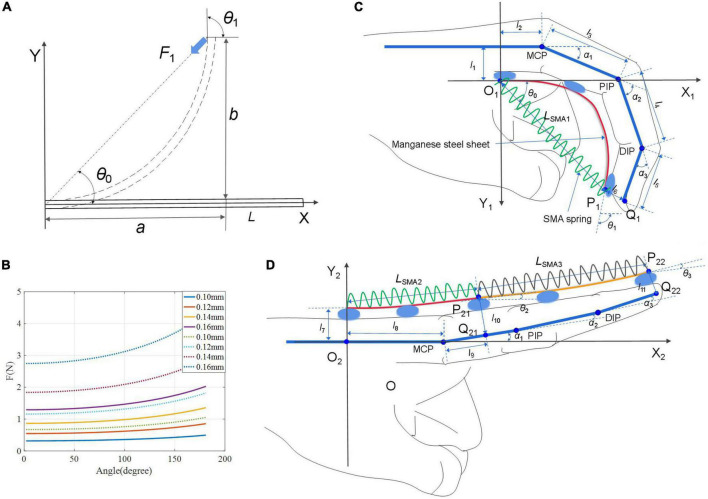
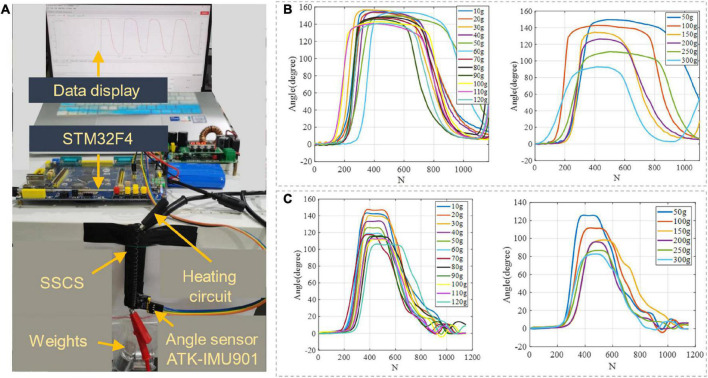
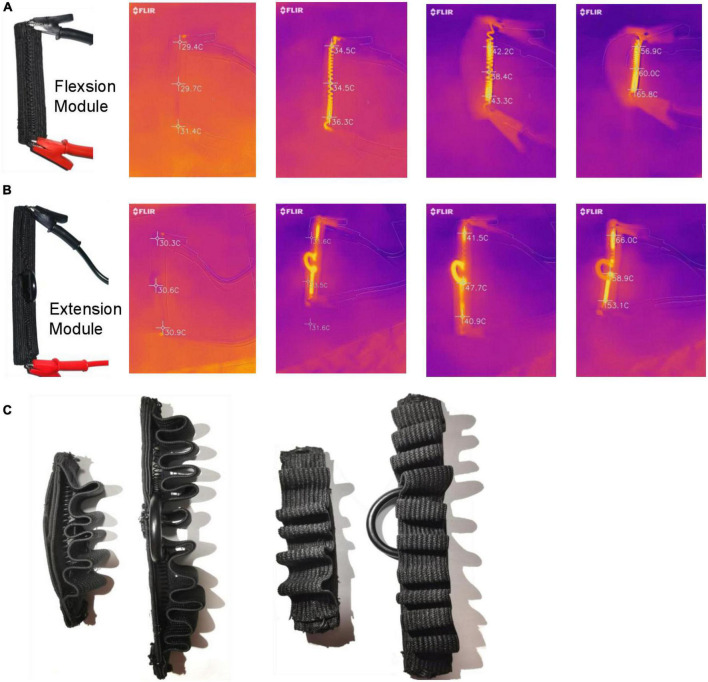
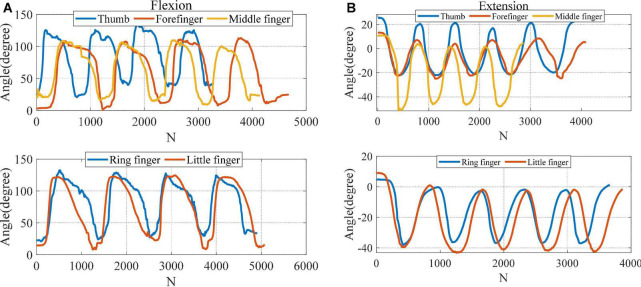
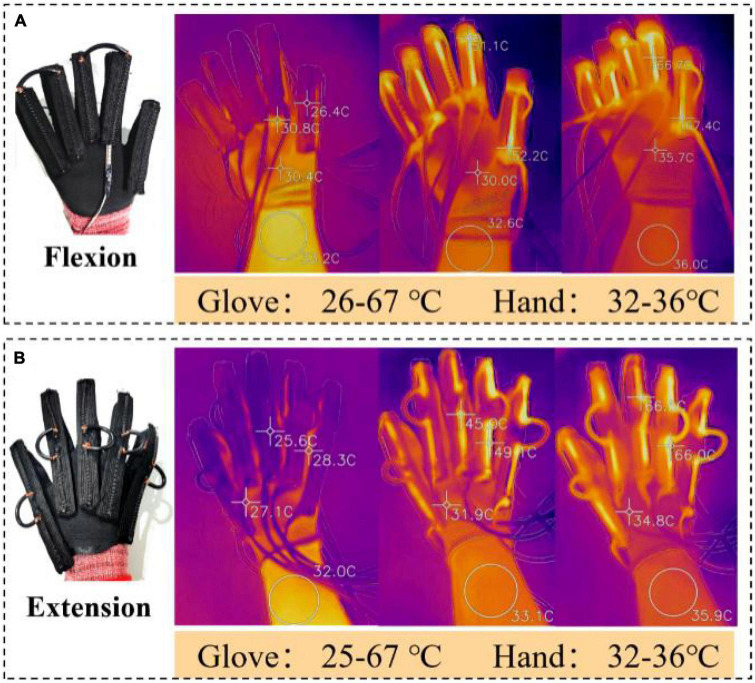
The combination of smart soft composite structure based shape memory alloy (SMA) and exoskeleton technology has the advantages of light weight, energy saving, and great human-exoskeleton interaction. However, there are no relevant studies on the application of SMA-based soft composite structure (SSCS) in hand exoskeletons. The main difficulty is that directional mechanical properties of SSCS need to comply with fingers movement, and SSCS can deliver enough output torque and displacement to the relevant joints. This paper aims to study the application of SSCS for wearable rehabilitation gloves and explore its bionic driving mechanism. This paper proposes a soft wearable glove (Glove-SSCS) for hand rehabilitation actuated by the SSCS, based on finger force analysis under different drive modes. The Glove-SSCS can support five-finger flexion and extension, weighs only 120 g, and adopts modular design. Each drive module adopts a soft composite structure. And the structure integrates actuation, sensing and execution, including an active layer (SMA spring), a passive layer (manganese steel sheet), a sensing layer (bending sensor) and connection layers. To obtain a high-performance SMA actuators, the performance of SMA materials was tested in terms of temperature and voltage, temperature at the shortest length, pre-tensile length and load. And the human-exoskeleton coupling model of Glove-SSCS is established and analyzed from force and motion. The results show that the Glove-SSCS can realize bidirectional movements of fingers flexion and extension, with ranges of motion are 90-110° and 30-40°, and their cycles are 13-19 s and 11-13 s. During the use of Glove-SSCS, the temperature of gloves is from 25 to 67°C, and the surface temperature of hands is from 32 to 36°C. The temperature of Glove-SSCS can be kept at the lowest temperature of SMA operation without much impact on the human body.
基于形状记忆合金(SMA)的智能软复合结构与外骨骼技术相结合,具有重量轻、节能以及人与外骨骼交互性好等优点。然而,关于基于SMA的软复合结构(SSCS)在手部外骨骼中的应用尚无相关研究。主要困难在于SSCS的定向力学性能需要符合手指运动,并且SSCS能够向相关关节传递足够的输出扭矩和位移。本文旨在研究SSCS在可穿戴康复手套中的应用,并探索其仿生驱动机制。基于不同驱动模式下的手指力分析,本文提出了一种由SSCS驱动的用于手部康复的软可穿戴手套(Glove-SSCS)。Glove-SSCS能够支持五指屈伸,重量仅为120克,采用模块化设计。每个驱动模块采用软复合结构。该结构集成了驱动、传感和执行功能,包括一个主动层(SMA弹簧)、一个被动层(锰钢片)、一个传感层(弯曲传感器)和连接层。为了获得高性能的SMA致动器,对SMA材料的性能进行了温度、电压、最短长度时的温度、预拉伸长度和负载等方面的测试。并建立了Glove-SSCS的人机外骨骼耦合模型,从力和运动方面进行了分析。结果表明,Glove-SSCS能够实现手指屈伸的双向运动,运动范围分别为90 - 110°和30 - 40°,其周期分别为13 - 19秒和11 - 13秒。在使用Glove-SSCS过程中,手套温度为25至67°C,手部表面温度为32至36°C。Glove-SSCS的温度能够保持在SMA运行的最低温度,对人体影响不大。