Araujo Rommel S, Silva Camille R, Netto Severino P N, Morya Edgard, Brasil Fabricio L
Edmond and Lily Safra International Institute of Neuroscience, Santos Dumont Institute, Macaíba, Brazil.
Federal Institute of Education, Science and Technology of Rio Grande Do Norte, Ceara-Mirim Campus, Ceará-Mirim, Brazil.
Front Neurosci. 2021 Jun 25;15:661569. doi: 10.3389/fnins.2021.661569. eCollection 2021.
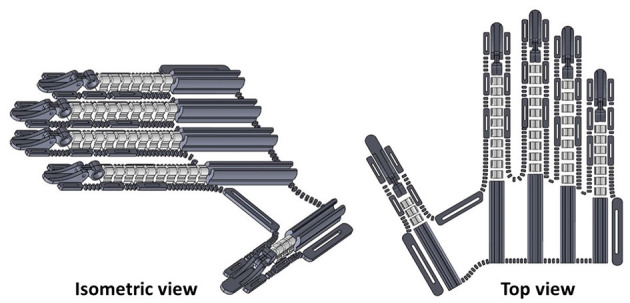
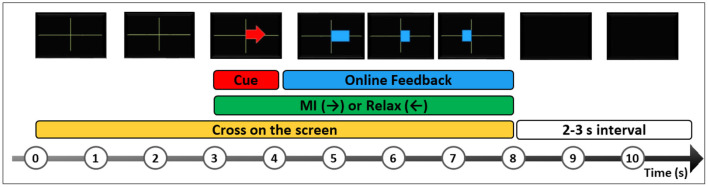
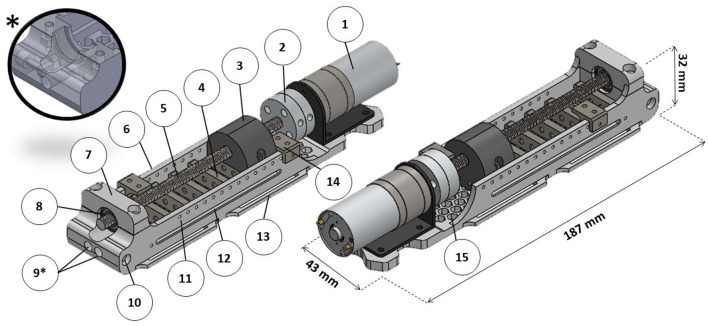
Stroke survivors can be affected by motor deficits in the hand. Robotic equipment associated with brain-machine interfaces (BMI) may aid the motor rehabilitation of these patients. BMIs involving orthotic control by motor imagery practices have been successful in restoring stroke patients' movements. However, there is still little acceptance of the robotic devices available, either by patients and clinicians, mainly because of the high costs involved. Motivated by this context, this work aims to design and construct the Hand Exoskeleton for Rehabilitation Objectives (HERO) to recover extension and flexion movements of the fingers. A three-dimensional (3D) printing technique in association with textiles was used to produce a lightweight and wearable device. 3D-printed actuators have also been designed to reduce equipment costs. The actuator transforms the torque of DC motors into linear force transmitted by Bowden cables to move the fingers passively. The exoskeleton was controlled by neuroelectric signal-electroencephalography (EEG). Concept tests were performed to evaluate control performance. A healthy volunteer was submitted to a training session with the exoskeleton, according to the Graz-BCI protocol. Ergonomy was evaluated with a two-dimensional (2D) tracking software and correlation analysis. HERO can be compared to ordinary clothing. The weight over the hand was around 102 g. The participant was able to control the exoskeleton with a classification accuracy of 91.5%. HERO project resulted in a lightweight, simple, portable, ergonomic, and low-cost device. Its use is not restricted to a clinical setting. Thus, users will be able to execute motor training with the HERO at hospitals, rehabilitation clinics, and at home, increasing the rehabilitation intervention time. This may support motor rehabilitation and improve stroke survivors life quality.
中风幸存者可能会受到手部运动功能障碍的影响。与脑机接口(BMI)相关的机器人设备可能有助于这些患者的运动康复。通过运动想象练习进行矫形控制的BMI已成功恢复中风患者的运动。然而,目前患者和临床医生对现有的机器人设备接受度仍然很低,主要原因是成本高昂。受此背景的推动,这项工作旨在设计和构建用于康复目的的手部外骨骼(HERO),以恢复手指的伸展和弯曲运动。采用三维(3D)打印技术与纺织品相结合的方式来制造一种轻便且可穿戴的设备。还设计了3D打印的致动器以降低设备成本。该致动器将直流电机的扭矩转换为由鲍登电缆传递的线性力,从而被动地移动手指。外骨骼由神经电信号——脑电图(EEG)控制。进行了概念测试以评估控制性能。根据格拉茨脑机接口协议,让一名健康志愿者使用外骨骼进行了一次训练。使用二维(2D)跟踪软件和相关性分析对人体工程学进行了评估。HERO可以与普通衣物相媲美。手部的重量约为102克。参与者能够以91.5%的分类准确率控制外骨骼。HERO项目制造出了一种轻便、简单、便携、符合人体工程学且低成本的设备。其使用并不局限于临床环境。因此,用户将能够在医院、康复诊所和家中使用HERO进行运动训练,增加康复干预时间。这可能有助于运动康复并提高中风幸存者的生活质量。