School of Electrical and Automation Engineering, East China Jiaotong University, Nanchang 330000, China.
Sensors (Basel). 2023 Apr 19;23(8):4102. doi: 10.3390/s23084102.
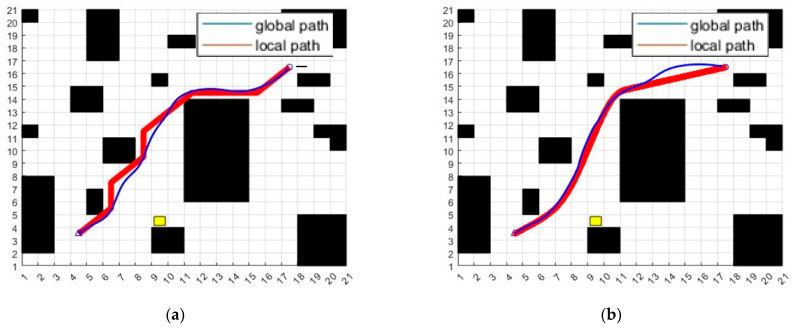
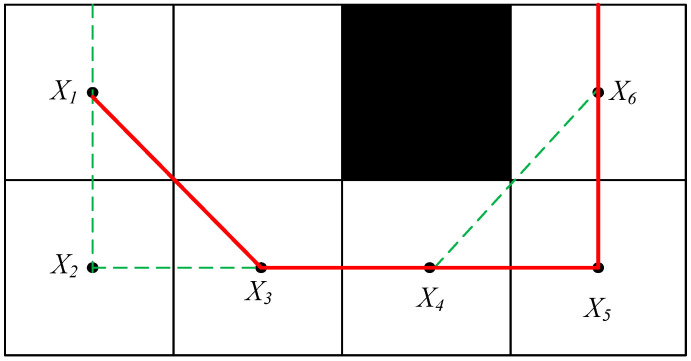
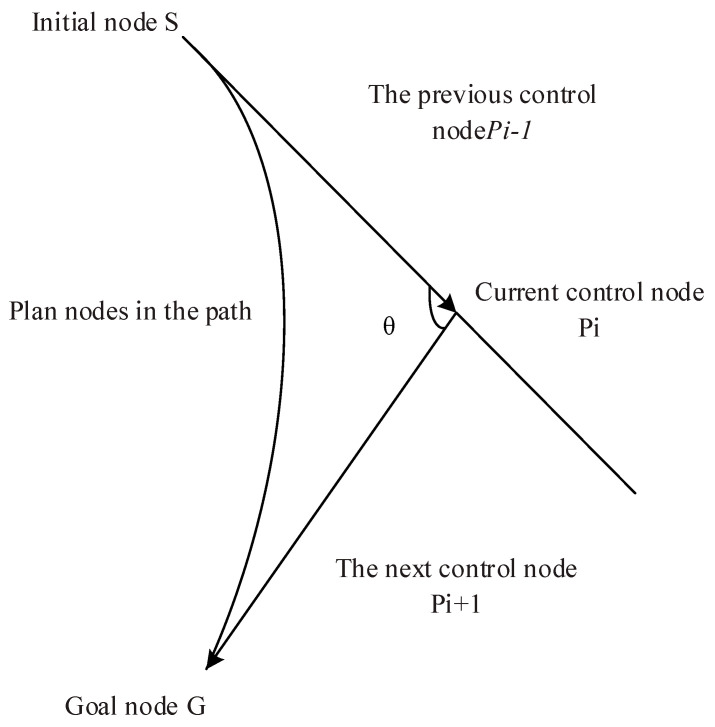
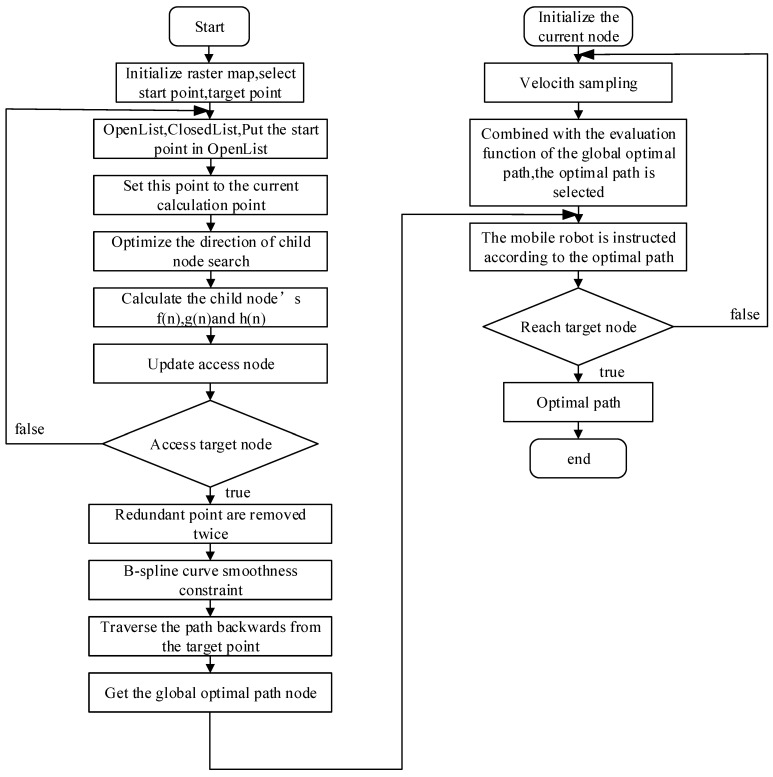
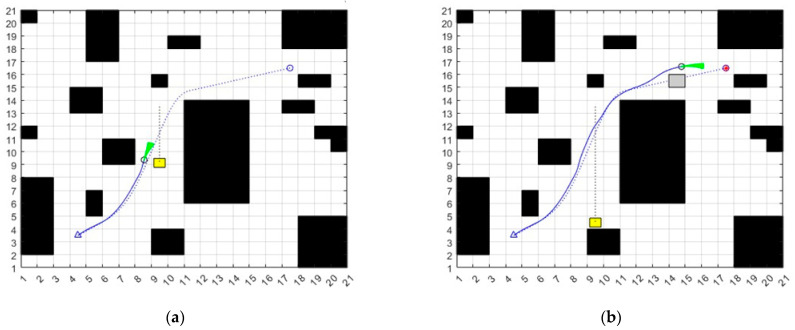
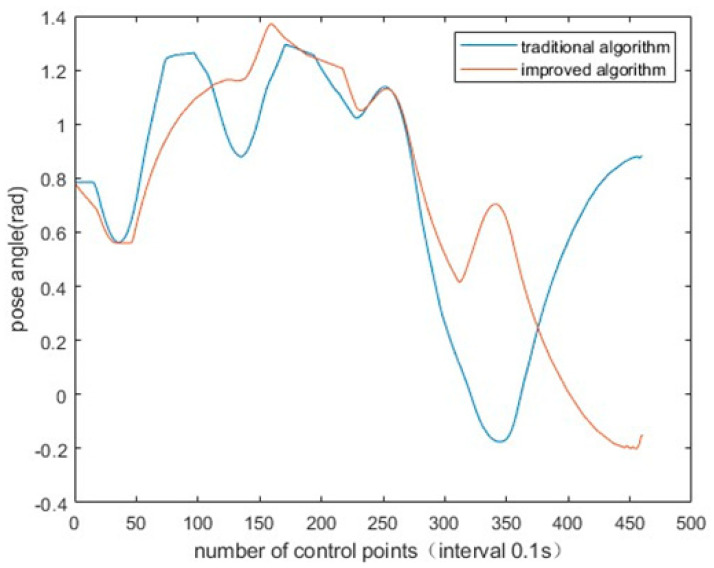
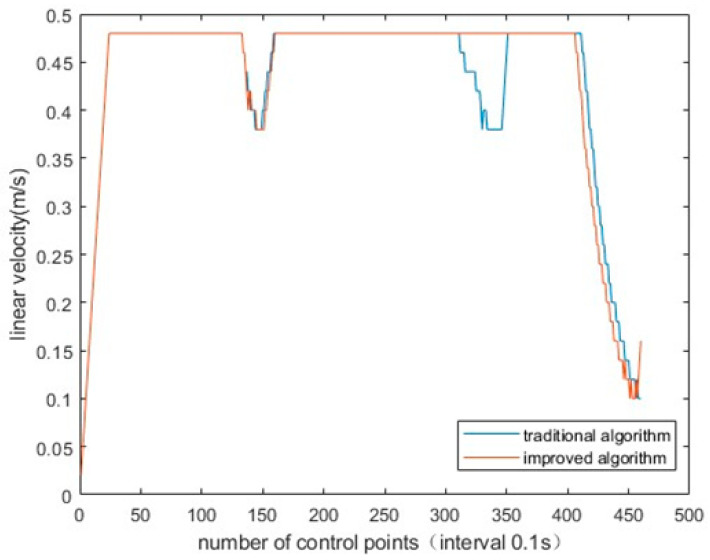
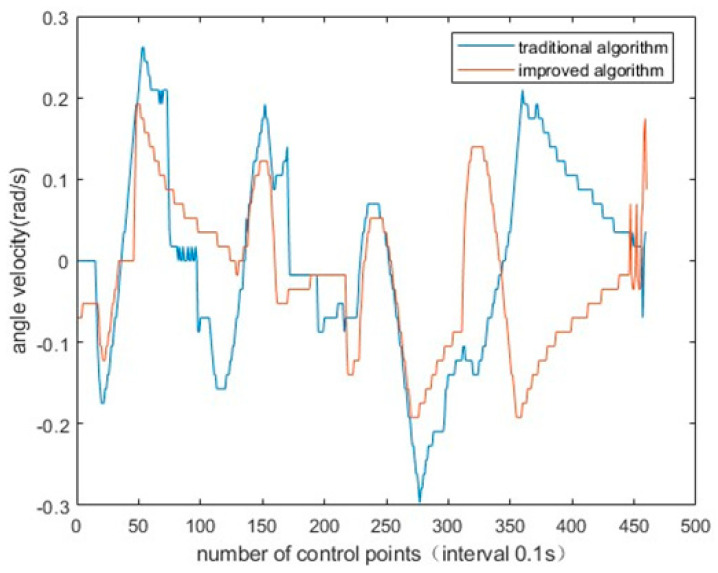
In the field of AGV, a path planning algorithm is always a heated area. However, traditional path planning algorithms have many disadvantages. To solve these problems, this paper proposes a fusion algorithm that combines the kinematical constraint A* algorithm and the following dynamic window approach algorithm. The kinematical constraint A* algorithm can plan the global path. Firstly, the node optimization can reduce the number of child nodes. Secondly, improving the heuristic function can increase efficiency of path planning. Thirdly, the secondary redundancy can reduce the number of redundant nodes. Finally, the B spline curve can make the global path conform to the dynamic characteristics of AGV. The following DWA algorithm can be dynamic path planning and allow the AGV to avoidance moving obstacle. The optimization heuristic function of the local path is closer to the global optimal path. The simulation results show that, compared with the fusion algorithm of traditional A* algorithm and traditional DWA algorithm, the fusion algorithm reduces the length of path by 3.6%, time of path by 6.7% and the number of turns of final path by 25%.
在 AGV 领域,路径规划算法一直是一个热点。然而,传统的路径规划算法存在许多缺点。为了解决这些问题,本文提出了一种融合算法,该算法将运动学约束 A算法和以下动态窗口方法算法相结合。运动学约束 A算法可以规划全局路径。首先,节点优化可以减少子节点的数量。其次,改进启发式函数可以提高路径规划的效率。第三,二次冗余可以减少冗余节点的数量。最后,B 样条曲线可以使全局路径符合 AGV 的动态特性。以下 DWA 算法可以进行动态路径规划,并允许 AGV 避免移动障碍物。局部路径的优化启发式函数更接近全局最优路径。仿真结果表明,与传统 A*算法和传统 DWA 算法的融合算法相比,融合算法减少了 3.6%的路径长度,6.7%的路径时间和 25%的最终路径转弯次数。