Liu Lisang, Liang Jingrun, Guo Kaiqi, Ke Chengyang, He Dongwei, Chen Jian
School of Electronic, Electrical Engineering and Physics, Fujian University of Technology, Fuzhou 350118, China.
Fujian Province Industrial Integrated Automation Industry Technology Development Base, Fuzhou 350118, China.
Biomimetics (Basel). 2023 Apr 27;8(2):182. doi: 10.3390/biomimetics8020182.
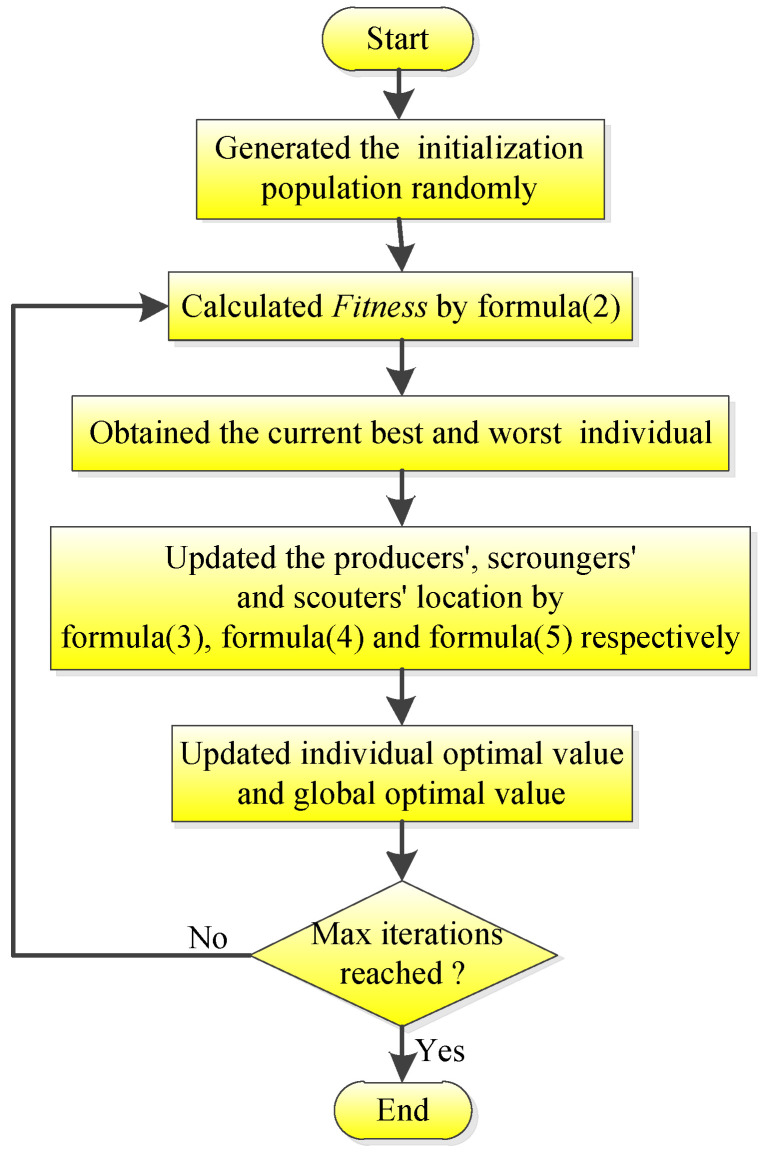
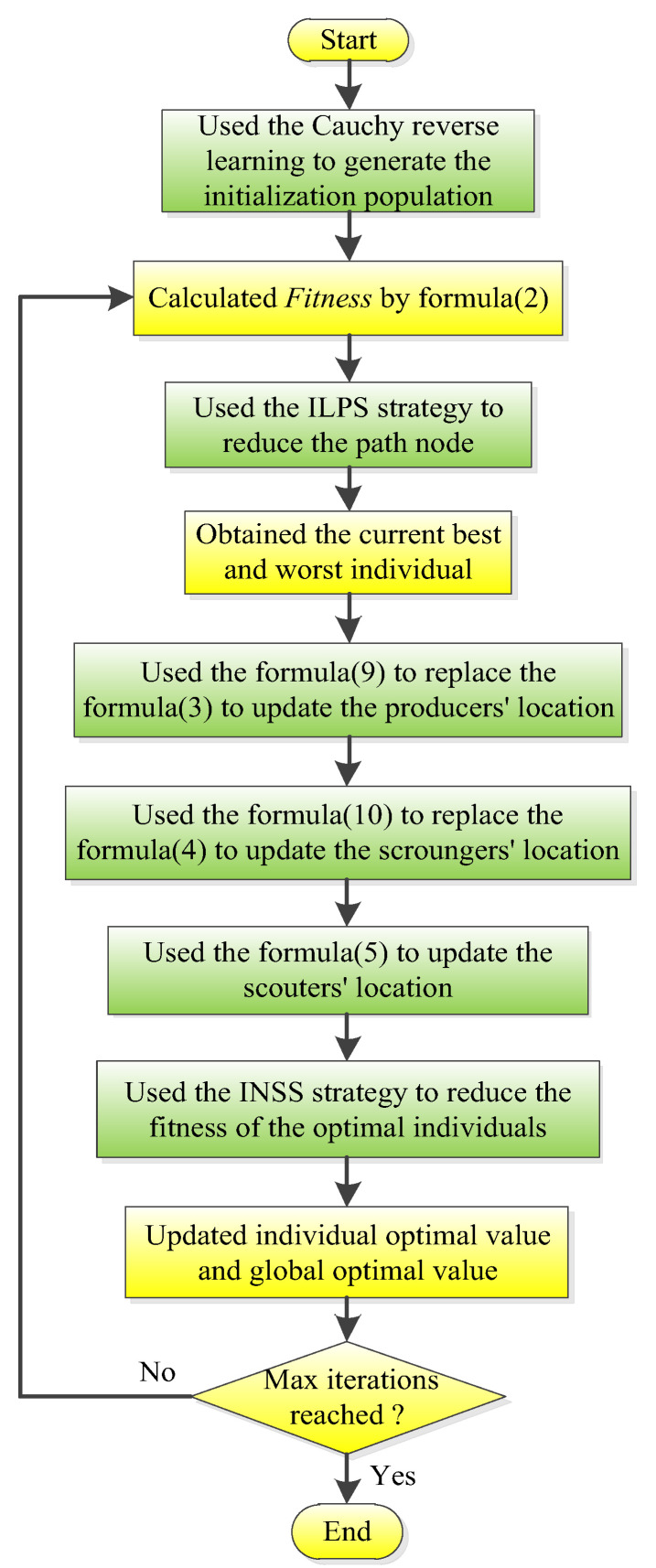
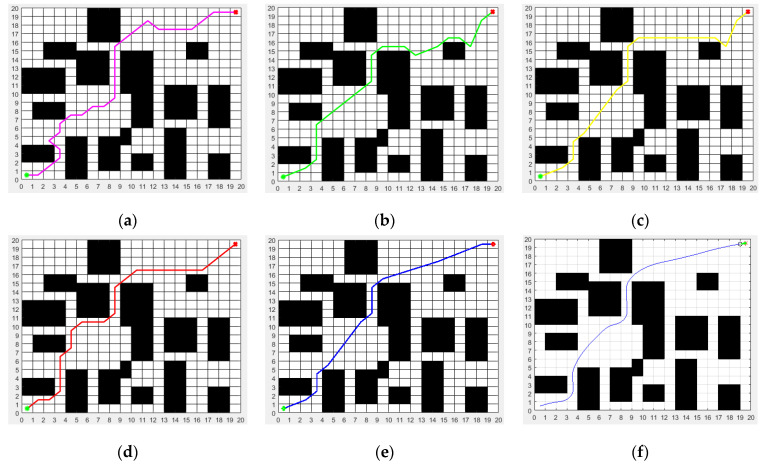
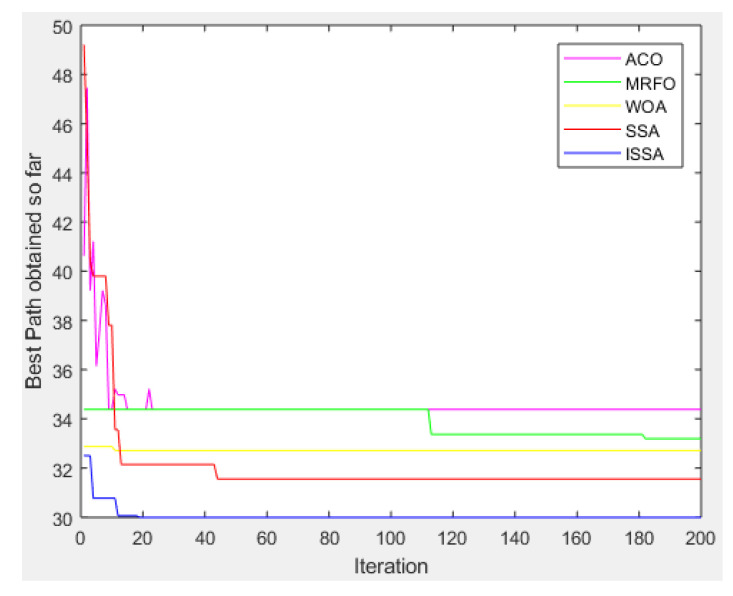
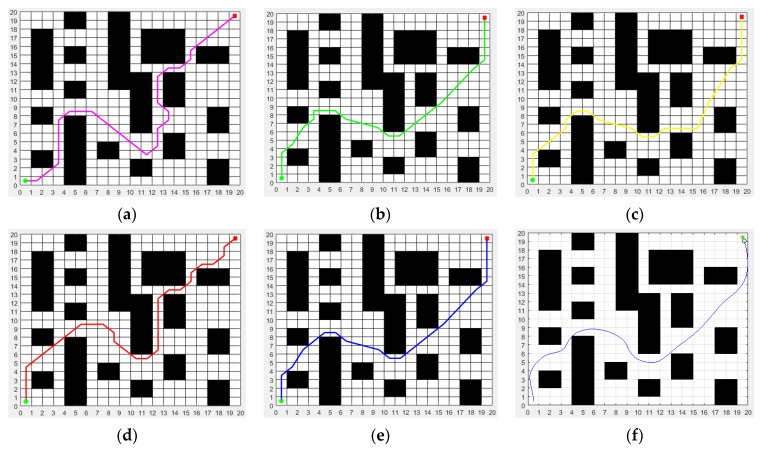
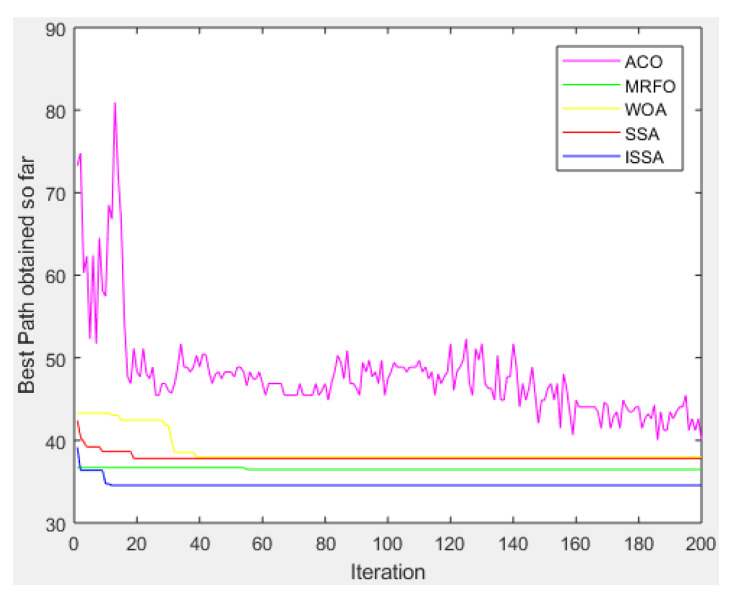
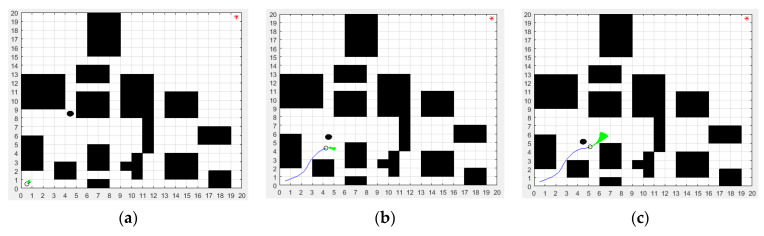
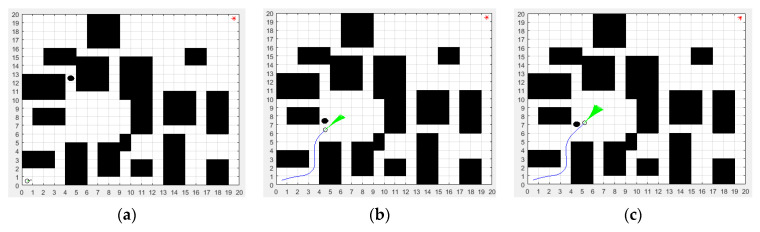
Aiming at the shortcomings of the traditional sparrow search algorithm (SSA) in path planning, such as its high time-consumption, long path length, it being easy to collide with static obstacles and its inability to avoid dynamic obstacles, this paper proposes a new improved SSA based on multi-strategies. Firstly, Cauchy reverse learning was used to initialize the sparrow population to avoid a premature convergence of the algorithm. Secondly, the sine-cosine algorithm was used to update the producers' position of the sparrow population and balance the global search and local exploration capabilities of the algorithm. Then, a Lévy flight strategy was used to update the scroungers' position to avoid the algorithm falling into the local optimum. Finally, the improved SSA and dynamic window approach (DWA) were combined to enhance the local obstacle avoidance ability of the algorithm. The proposed novel algorithm is named ISSA-DWA. Compared with the traditional SSA, the path length, path turning times and execution time planned by the ISSA-DWA are reduced by 13.42%, 63.02% and 51.35%, respectively, and the path smoothness is improved by 62.29%. The experimental results show that the ISSA-DWA proposed in this paper can not only solve the shortcomings of the SSA but can also plan a highly smooth path safely and efficiently in the complex dynamic obstacle environment.
针对传统麻雀搜索算法(SSA)在路径规划中存在的时间消耗大、路径长度长、易与静态障碍物碰撞以及无法避开动态障碍物等缺点,本文提出了一种基于多策略的改进型SSA。首先,采用柯西反向学习对麻雀种群进行初始化,以避免算法过早收敛。其次,利用正弦余弦算法更新麻雀种群中生产者的位置,平衡算法的全局搜索和局部探索能力。然后,采用莱维飞行策略更新觅食者的位置,避免算法陷入局部最优。最后,将改进后的SSA与动态窗口方法(DWA)相结合,增强算法的局部避障能力。所提出的新算法命名为ISSA-DWA。与传统SSA相比,ISSA-DWA规划的路径长度、路径转弯次数和执行时间分别减少了13.42%、63.02%和51.35%,路径平滑度提高了62.29%。实验结果表明,本文提出的ISSA-DWA不仅能够解决SSA的缺点,还能够在复杂动态障碍物环境中安全、高效地规划出高度平滑的路径。