Department of Rehabilitation Science, School of Medicine, Osaka Metropolitan University, 3-7-30, Habikino, Osaka, 583-8555, Japan.
Department of Rehabilitation Medicine, Hyogo College of Medicine, Nishinomiya, Hyogo, Japan.
Sci Rep. 2023 Jun 6;13(1):9217. doi: 10.1038/s41598-023-34556-3.
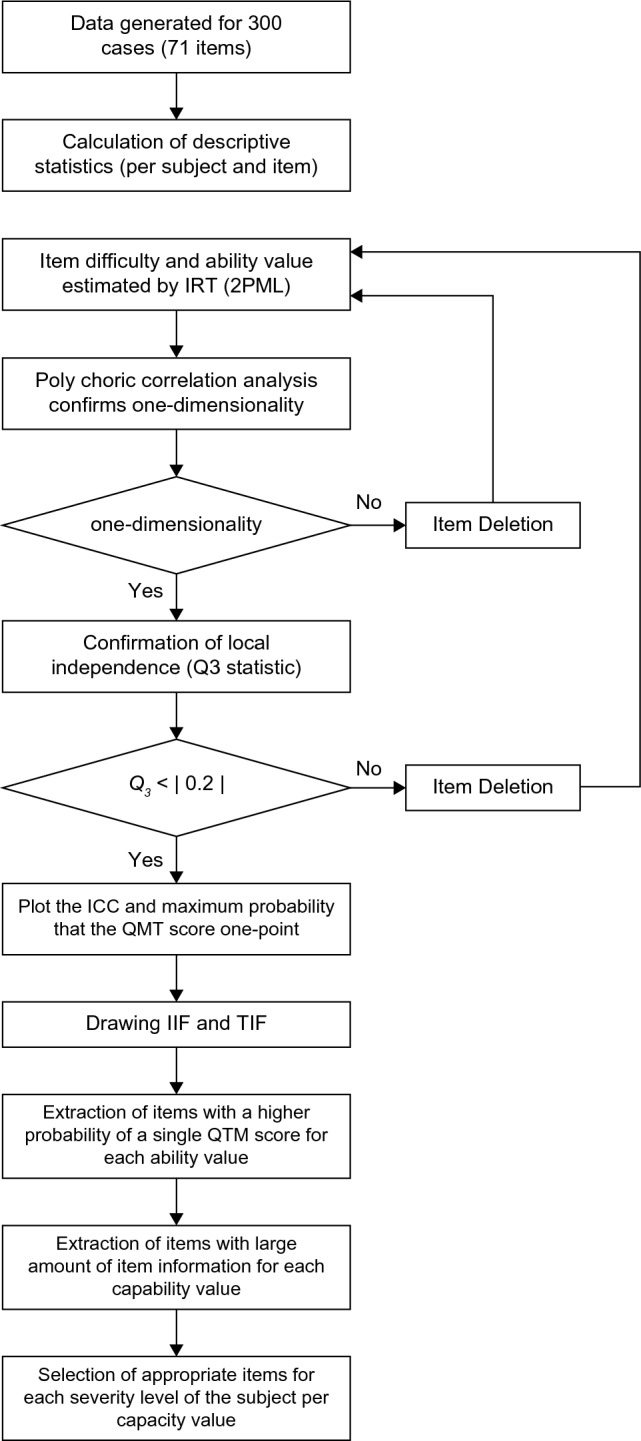
Robot-assisted therapy can effectively treat upper extremity (UE) paralysis in patients who experience a stroke. Presently, UE, as a training item, is selected according to the severity of the paralysis based on a clinician's experience. The possibility of objectively selecting robot-assisted training items based on the severity of paralysis was simulated using the two-parameter logistic model item response theory (2PLM-IRT). Sample data were generated using the Monte Carlo method with 300 random cases. This simulation analyzed sample data (categorical data with three difficulty values of 0, 1, and 2 [0: too easy, 1: adequate, and 2: too difficult]) with 71 items per case. First, the most appropriate method was selected to ensure the local independence of the sample data necessary to use 2PLM-IRT. The method was to exclude items with low response probability (maximum response probability) within a pair in the Quality of Compensatory Movement Score (QCM) 1-point item difficulty curve, items with low item information content within a pair in the QCM 1-point item difficulty curve, and items with low item discrimination. Second, 300 cases were analyzed to determine the most appropriate model (one-parameter or two-parameter item response therapy) to be used and the most favored method to establish local independence. We also examined whether robotic training items could be selected according to the severity of paralysis based on the ability of a person (θ) in the sample data as calculated by 2PLM-IRT. Excluding items with low response probability (maximum response probability) in a pair in the categorical data 1-point item difficulty curve was effective in ensuring local independence. Additionally, to ensure local independence, the number of items should be reduced to 61 from 71, indicating that the 2PLM-IRT was an appropriate model. The ability of a person (θ) calculated by 2PLM-IRT suggested that seven training items could be estimated from 300 cases according to severity. This simulation made it possible to objectively estimate the training items according to the severity of paralysis in a sample of approximately 300 cases using this model.
机器人辅助疗法可以有效治疗中风后上肢(UE)瘫痪的患者。目前,UE 作为一种训练项目,是根据临床医生的经验,根据瘫痪的严重程度来选择的。本研究使用双参数逻辑模型项目反应理论(2PLM-IRT)模拟基于瘫痪严重程度客观选择机器人辅助训练项目的可能性。使用蒙特卡罗方法生成了 300 个随机案例的样本数据。该模拟分析了样本数据(类别数据,有 0、1 和 2 三个难度值[0:太容易,1:适当,2:太难]),每个案例有 71 个项目。首先,选择最合适的方法来确保使用 2PLM-IRT 时样本数据的局部独立性。该方法是排除 QCM 1 分项目难度曲线中一对内低响应概率(最大响应概率)的项目、QCM 1 分项目难度曲线中一对内低项目信息含量的项目以及低项目辨别力的项目。其次,分析 300 个案例以确定最合适的模型(单参数或双参数项目反应疗法)和建立局部独立性的最受欢迎的方法。我们还检查了根据 2PLM-IRT 计算的样本数据中个人能力(θ),是否可以根据瘫痪的严重程度选择机器人训练项目。排除类别数据 1 分项目难度曲线中一对内低响应概率(最大响应概率)的项目对确保局部独立性有效。此外,为确保局部独立性,从 71 个项目减少到 61 个项目,表明 2PLM-IRT 是合适的模型。2PLM-IRT 计算的个人能力(θ)表明,根据严重程度,可以从 300 个案例中估计出 7 个训练项目。该模拟使用该模型,对大约 300 个样本中的瘫痪严重程度进行客观估计,从而可以实现训练项目的客观估计。