Department of Cognitive Neuroscience, Bielefeld University, 33501, Bielefeld, Germany.
School of Business, Social and Decision Sciences, Constructor University Bremen, 28759, Bremen, Germany.
Exp Brain Res. 2023 Jul;241(7):1721-1738. doi: 10.1007/s00221-023-06644-3. Epub 2023 Jun 12.
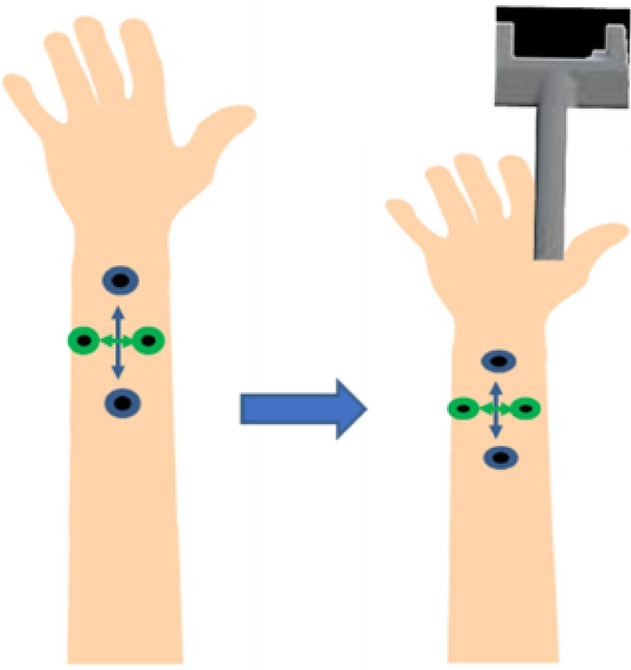
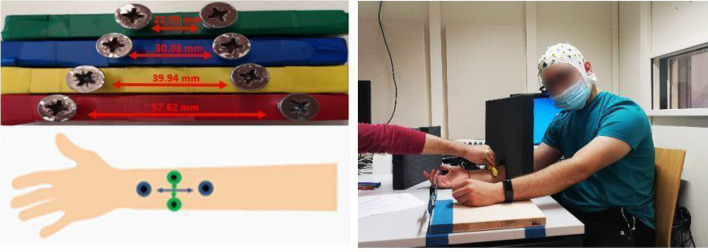
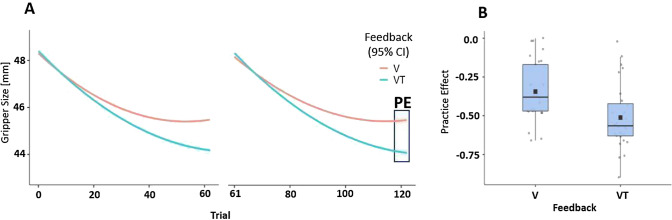
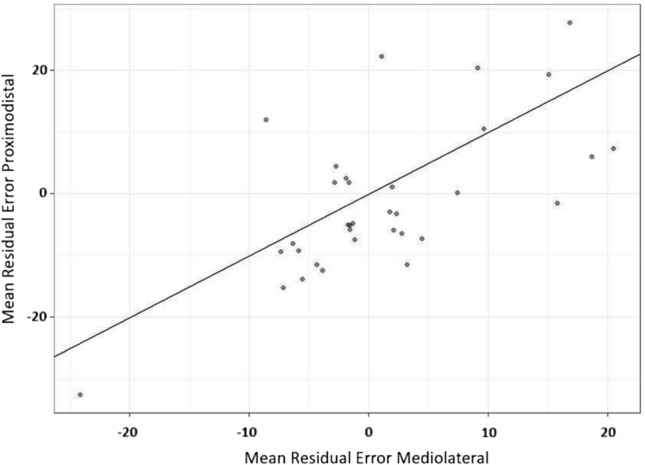
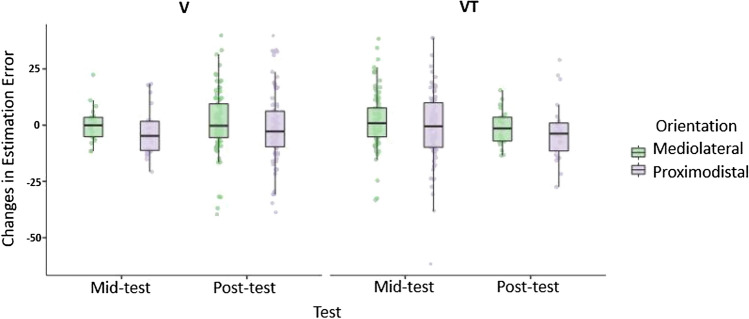
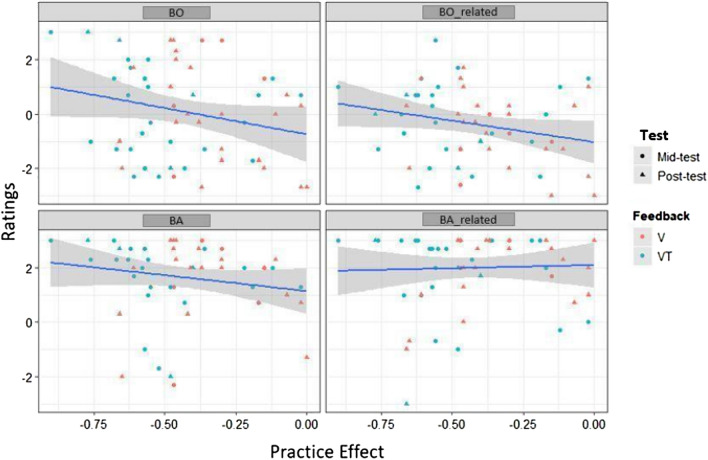
In this study we examined if training with a virtual tool in augmented reality (AR) affects the emergence of ownership and agency over the tool and whether this relates to changes in body schema (BS). 34 young adults learned controlling a virtual gripper to grasp a virtual object. In the visuo-tactile (VT) but not the vision-only (V) condition, vibro-tactile feedback was applied to the palm, thumb and index fingers through a CyberTouch II glove when the tool touched the object. Changes in the forearm BS were assessed with a tactile distance judgement task (TDJ) where participants judged distances between two tactile stimuli applied to their right forearm either in proximodistal or mediolateral orientation. Participants further rated their perceived ownership and agency after training. TDJ estimation errors were reduced after training for proximodistal orientations, suggesting that stimuli oriented along the arm axis were perceived as closer together. Higher ratings for ownership were associated with increasing performance level and more BS plasticity, i.e., stronger reduction in TDJ estimation error, and after training in the VT as compared to the V feedback condition, respectively. Agency over the tool was achieved independent of BS plasticity. We conclude that the emergence of a sense of ownership but not agency depends on performance level and the integration of the virtual tool into the arm representation.
在这项研究中,我们研究了在增强现实(AR)中使用虚拟工具进行训练是否会影响对工具的所有权和自主性的出现,以及这是否与身体图式(BS)的变化有关。34 名年轻成年人学习控制虚拟夹具来抓取虚拟物体。在视觉触觉(VT)条件下而不是仅视觉(V)条件下,当工具接触物体时,CyberTouch II 手套会通过振动触觉反馈施加到手掌、拇指和食指上。通过触觉距离判断任务(TDJ)评估前臂 BS 的变化,参与者在右前臂上以近端到远端或中间到外侧的方向判断两个触觉刺激之间的距离。参与者在训练后进一步对其感知的所有权和自主性进行评分。在训练后,对于近端到远端的方向,TDJ 估计误差减小,这表明沿着手臂轴的刺激被感知为彼此更近。更高的所有权评分与更高的表现水平和更强的 BS 可塑性相关,即 TDJ 估计误差的减小幅度更大,并且与 V 反馈条件相比,在 VT 反馈条件下训练后所有权评分更高。对工具的自主性的出现独立于 BS 可塑性。我们得出结论,所有权的出现而不是自主性的出现取决于表现水平和将虚拟工具整合到手臂表示中。