Altermatt M, Kalt D, Blättler P, Schkommodau E
Institute for Medical Engineering and Medical Informatics, School of Life Sciences, University of Applied Sciences Northwestern Switzerland, Hofackerstrasse 30, Muttenz CH 4132, Switzerland.
Orthovet, Fasanenstrasse 13, CH 4402 Frenkendorf, Switzerland.
Vet Anim Sci. 2023 Jun 10;21:100301. doi: 10.1016/j.vas.2023.100301. eCollection 2023 Sep.
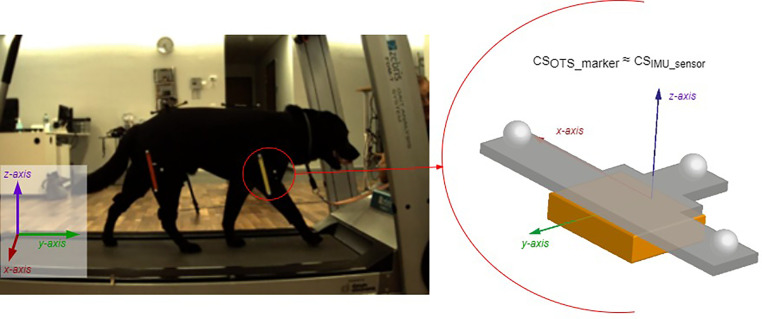
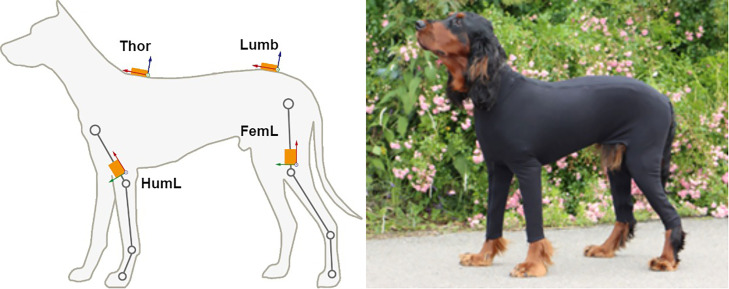
This study aims to investigate two simple algorithms for extracting gait features from an inertial measurement unit (IMU) based canine gait analysis system. The first algorithm was developed to determine the hip/shoulder extension/flexion range of motion. The second algorithm automatically determines the stance and swing phase per leg. To investigate the accuracy of the algorithms, two dogs were walked on a treadmill and measured simultaneously with an IMU system, an optical tracking system and two cameras. The range of motion estimation was compared to the optical tracking systems, with a total of 280 steps recorded. To test the stance and swing phase detection, a total of 63 steps were manually annotated in the video recordings and compared with the output of the algorithm. The IMU's-based estimation of the range of motion showed an average deviation of 1.4° to 5.6° from the optical reference, while the average deviation in the detection of the beginning and end of the stance and swing phases ranged from -0.01 to 0.09 s. This study shows that even simple algorithms can extract relevant information from inertial measurements that are comparable to results from more complex approaches. However, additional studies including a wider subject pool need to be conducted to investigate the significance of the presented findings.
本研究旨在探究两种简单算法,用于从基于惯性测量单元(IMU)的犬类步态分析系统中提取步态特征。第一种算法用于确定髋部/肩部伸展/屈曲的运动范围。第二种算法可自动确定每条腿的站立期和摆动期。为研究算法的准确性,让两只狗在跑步机上行走,并同时使用IMU系统、光学跟踪系统和两台摄像机进行测量。将运动范围估计值与光学跟踪系统进行比较,共记录了280步。为测试站立期和摆动期检测,在视频记录中手动标注了总共63步,并与算法输出结果进行比较。基于IMU的运动范围估计与光学参考值的平均偏差为1.4°至5.6°,而站立期和摆动期开始和结束检测中的平均偏差范围为-0.01至0.09秒。本研究表明,即使是简单算法也能从惯性测量中提取与更复杂方法的结果相当的相关信息。然而,需要进行包括更广泛受试群体的进一步研究,以探究所呈现结果的意义。