Department of Molecular Microbiology and Immunology, School of Medicine, University of Missouri, One Hospital Dr., Columbia, MO, 65212, USA.
Department of Biomedical, Biological & Chemical Engineering, University of Missouri, 1406 E. Rollins St. #249, Columbia, MO, 65211-5200, USA.
Sci Rep. 2022 Mar 21;12(1):4788. doi: 10.1038/s41598-022-08676-1.
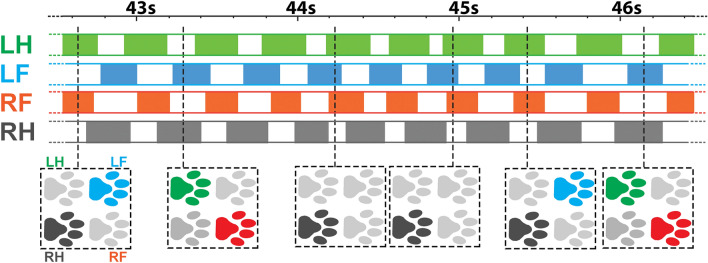
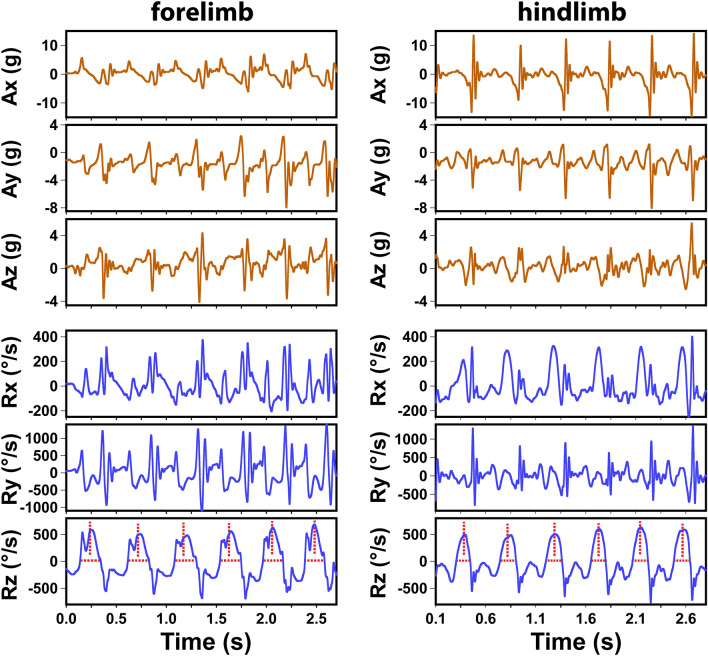
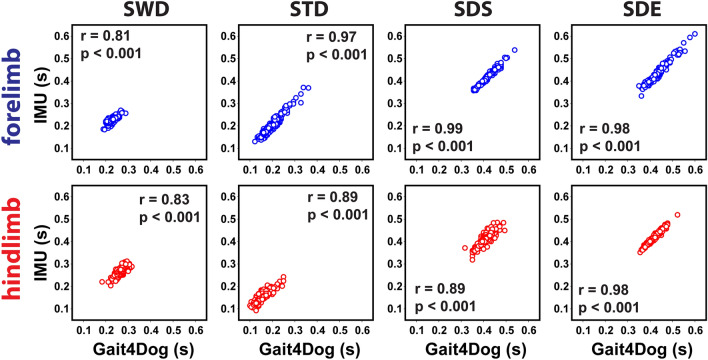
This study aims to develop a 4-limb canine gait analysis system using wireless inertial measurement units (IMUs). 3D printed sensor holders were designed to ensure quick and consistent sensor mounting. Signal analysis algorithms were developed to automatically determine the timing of swing start and end in a stride. To evaluate the accuracy of the new system, a synchronized study was conducted in which stride parameters in four dogs were measured simultaneously using the 4-limb IMU system and a pressure-sensor based walkway gait system. The results showed that stride parameters measured in both systems were highly correlated. Bland-Altman analyses revealed a nominal mean measurement bias between the two systems in both forelimbs and hindlimbs. Overall, the disagreement between the two systems was less than 10% of the mean value in over 92% of the data points acquired from forelimbs. The same performance was observed in hindlimbs except for one parameter due to small mean values. We demonstrated that this 4-limb system could successfully visualize the overall gait types and identify rapid gait changes in dogs. This method provides an effective, low-cost tool for gait studies in veterinary applications or in translational studies using dog models of neuromuscular diseases.
本研究旨在开发一种使用无线惯性测量单元(IMU)的四足犬步态分析系统。设计了 3D 打印的传感器固定器,以确保快速且一致的传感器安装。开发了信号分析算法,以自动确定步幅中摆动开始和结束的时间。为了评估新系统的准确性,进行了一项同步研究,其中使用四足 IMU 系统和基于压力传感器的步道步态系统同时测量了四只狗的步幅参数。结果表明,两个系统测量的步幅参数高度相关。 Bland-Altman 分析显示,两个系统在前肢和后肢的测量值之间存在名义平均测量偏差。总体而言,在从前肢获得的超过 92%的数据点中,两个系统之间的差异小于平均值的 10%。在后肢也观察到了相同的性能,除了一个由于平均值较小的参数。我们证明了这种四足系统可以成功地可视化整体步态类型,并识别犬只快速步态变化。这种方法为兽医应用中的步态研究或使用神经肌肉疾病犬模型的转化研究提供了一种有效、低成本的工具。