Renault Group Technical Centre, 1 Avenue. du Golf, 78280 Guyancourt, France.
Autonomous Systems and Robotics Lab/U2IS, ENSTA Paris, Institut Polytechnique de Paris, 91120 Palaiseau, France.
Sensors (Basel). 2023 Jun 25;23(13):5877. doi: 10.3390/s23135877.
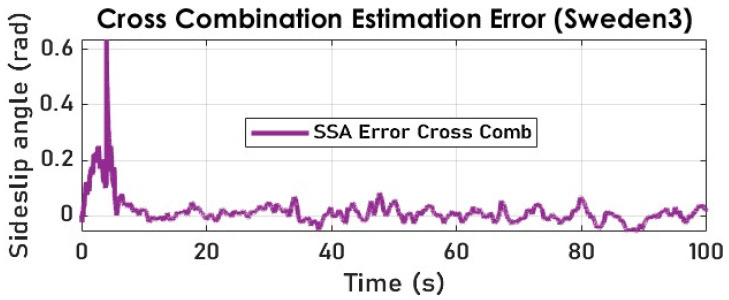
This paper presents a state-of-the-art estimation technique by cross-combining a number n of filters for high-precision, reliable and robust vehicle sideslip angle state estimation, over a full range of vehicle operations irrespective of the driving mission and disruptions that may occur in the system. A machine-learning algorithm based on decision trees connects several filters together to switch between them according to the driving context, ensuring the best possible state estimate for relatively small and large sideslip angle values. In conjunction with the above-mentioned aspects, a seamless transition between different vehicle models is attained by observing the key parameters characterizing the lateral motion of the vehicle. The tests conducted using a prototype vehicle on a snow-covered track confirm the effectiveness and reliability of the proposed approach.
本文提出了一种先进的估计技术,通过交叉组合 n 个滤波器,实现高精度、可靠和鲁棒的车辆侧偏角状态估计,适用于车辆的全操作范围,无论驾驶任务如何,以及系统中可能发生的干扰。基于决策树的机器学习算法将多个滤波器连接在一起,根据驾驶环境在它们之间切换,确保在较小和较大侧偏角值下获得最佳的状态估计。结合上述方面,通过观察车辆横向运动的特征参数,实现了不同车辆模型之间的无缝过渡。在雪覆盖的轨道上使用原型车进行的测试证实了所提出方法的有效性和可靠性。