Rogatinsky Jacob, Gomatam Kiran, Lim Zi Heng, Lee Megan, Kinnicutt Lorenzo, Duriez Christian, Thomson Perry, McDonald Kevin, Ranzani Tommaso
Department of Mechanical Engineering, Boston University, Boston, MA 02215, USA.
INRIA, CNRS, Centrale Lille, Team DEFROST University Lille, Lille F-59000, France.
Adv Intell Syst. 2022 Oct;4(10). doi: 10.1002/aisy.202200085. Epub 2022 Jun 26.
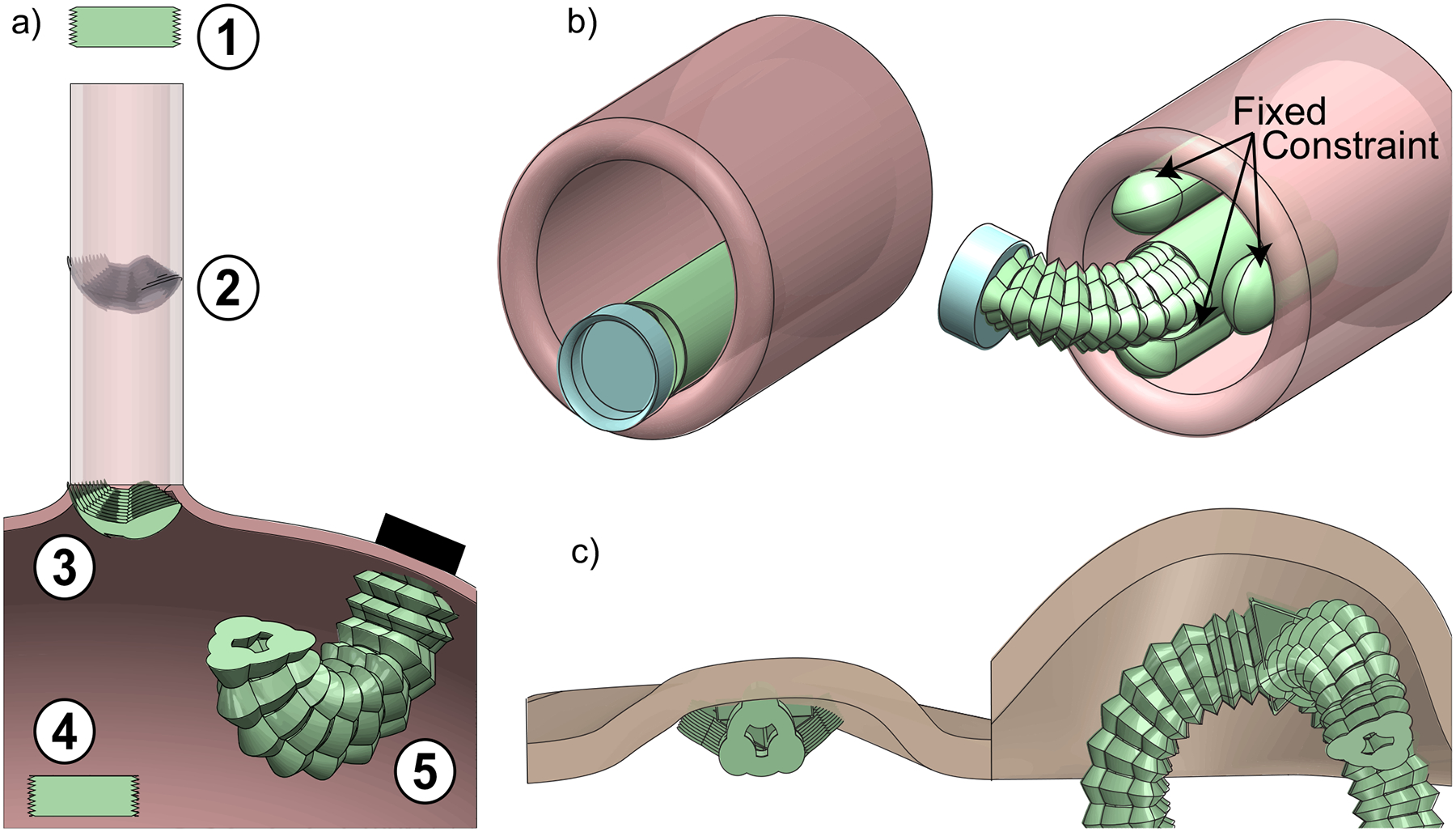
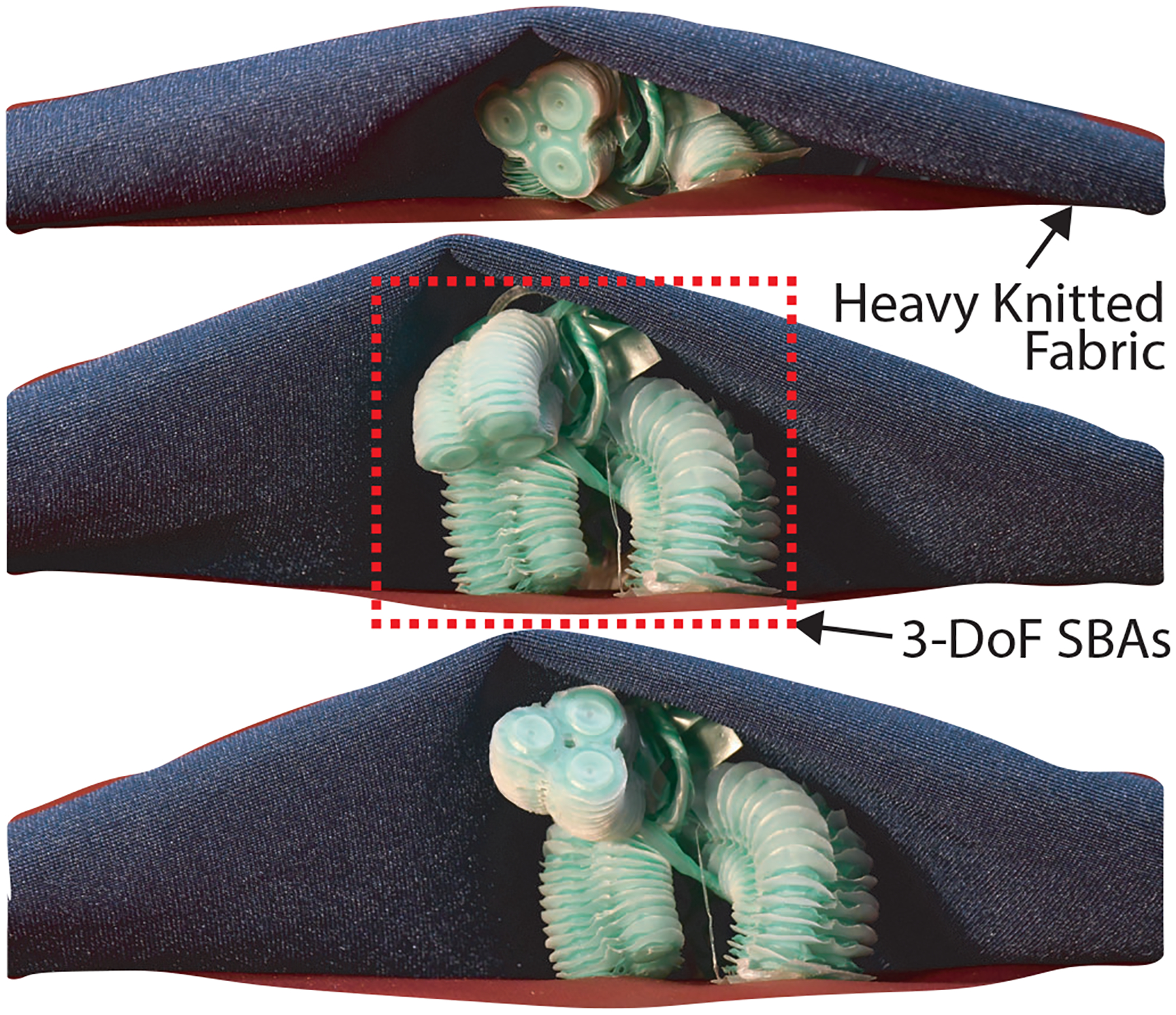
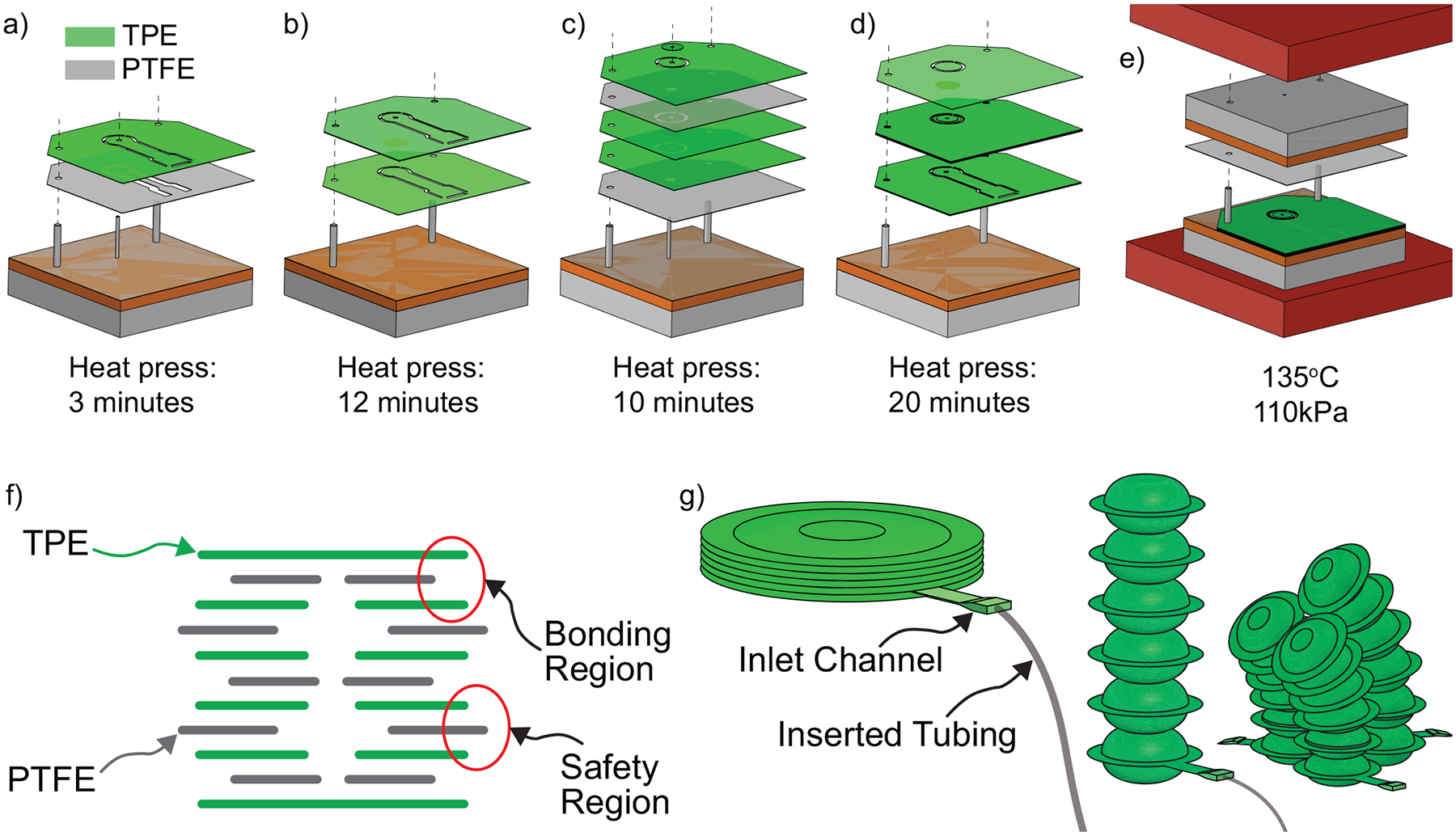
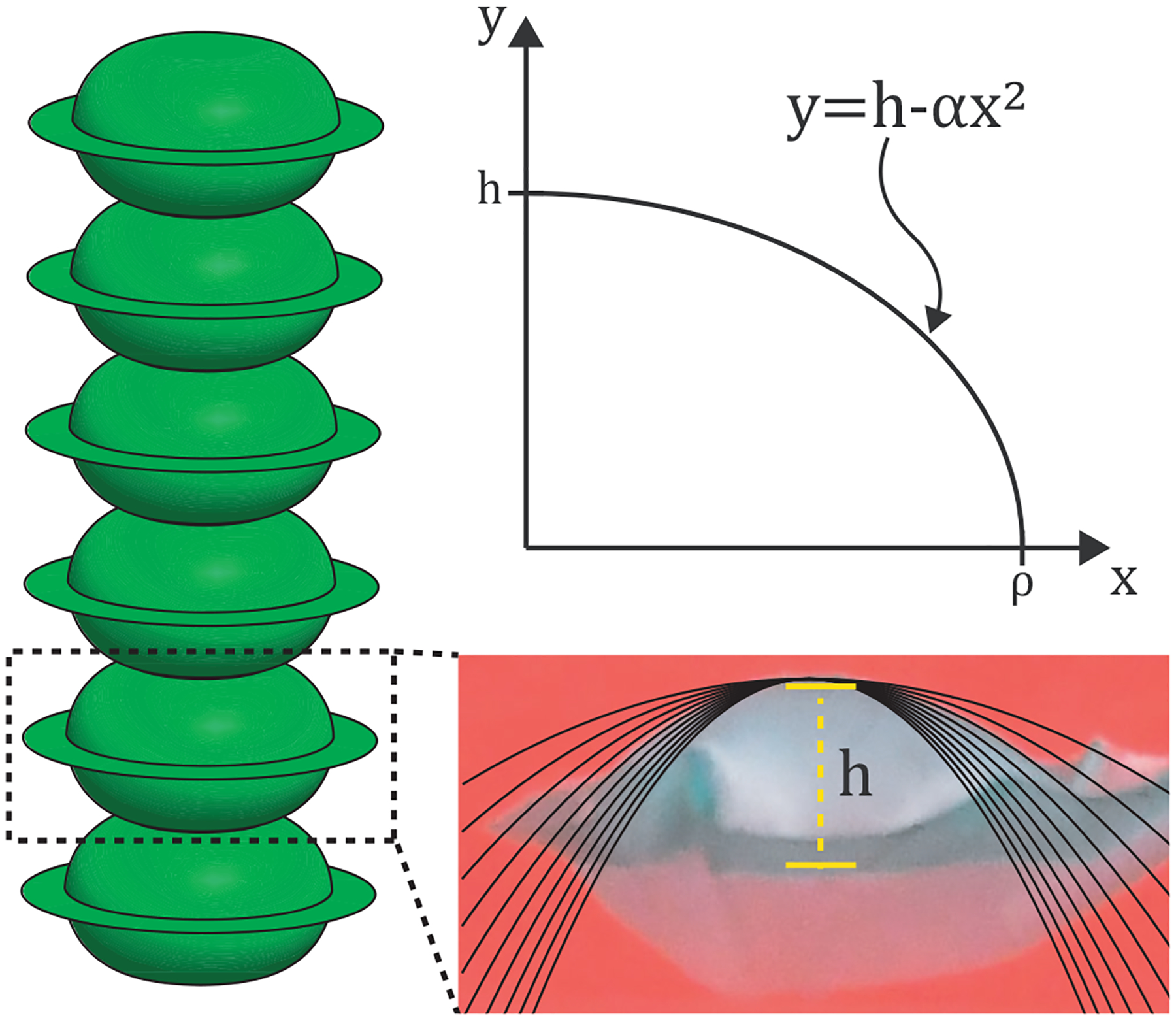
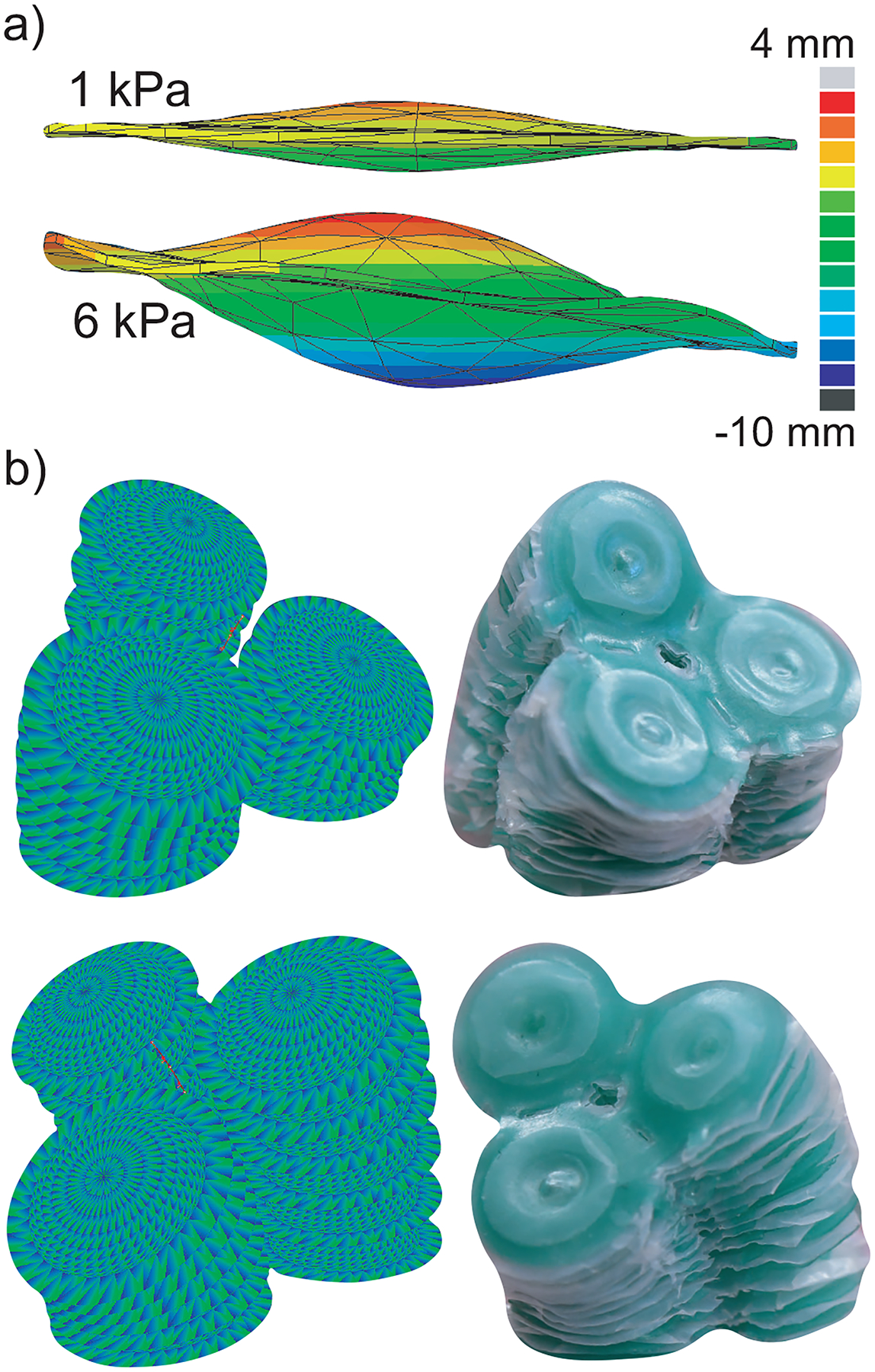
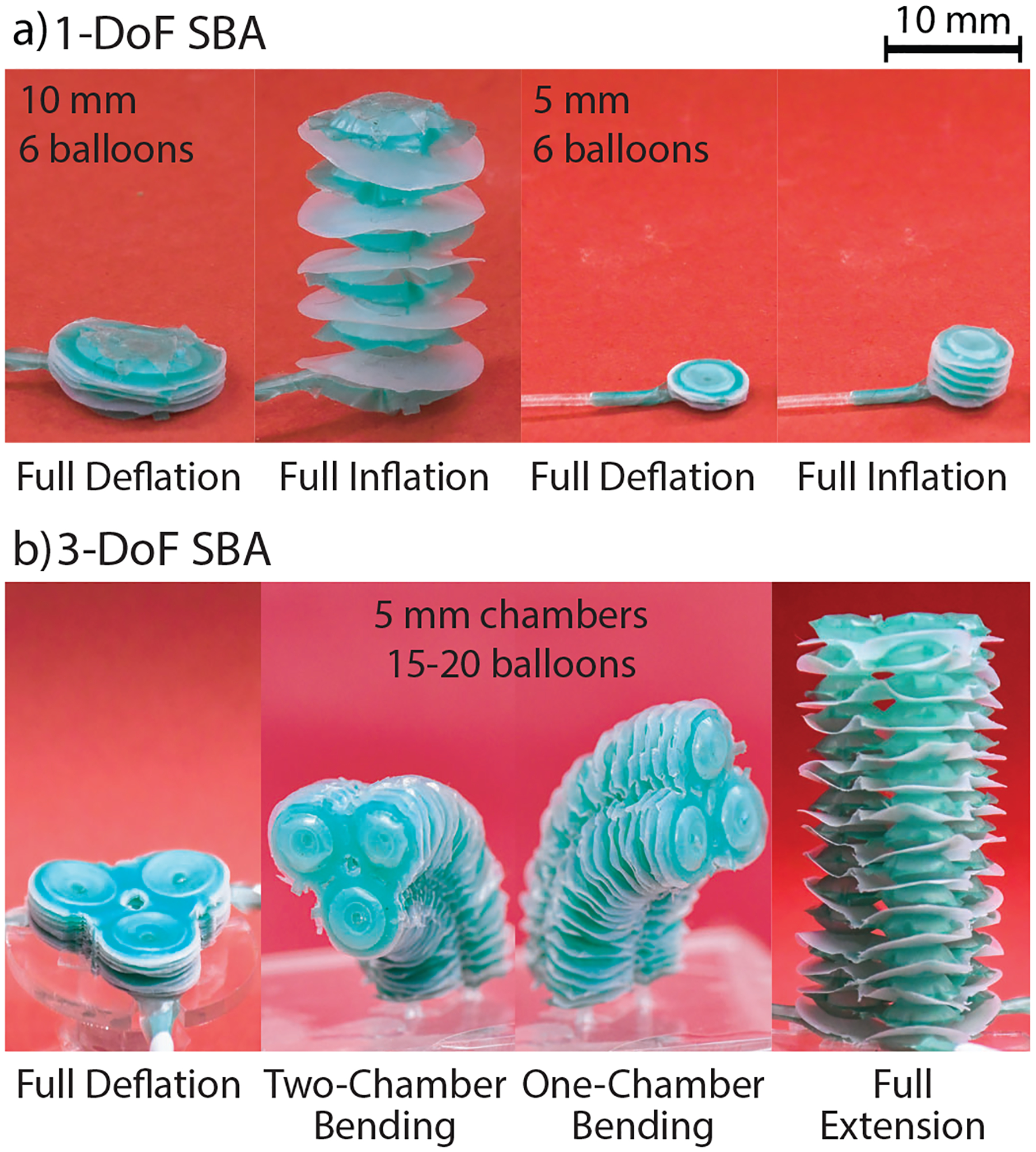
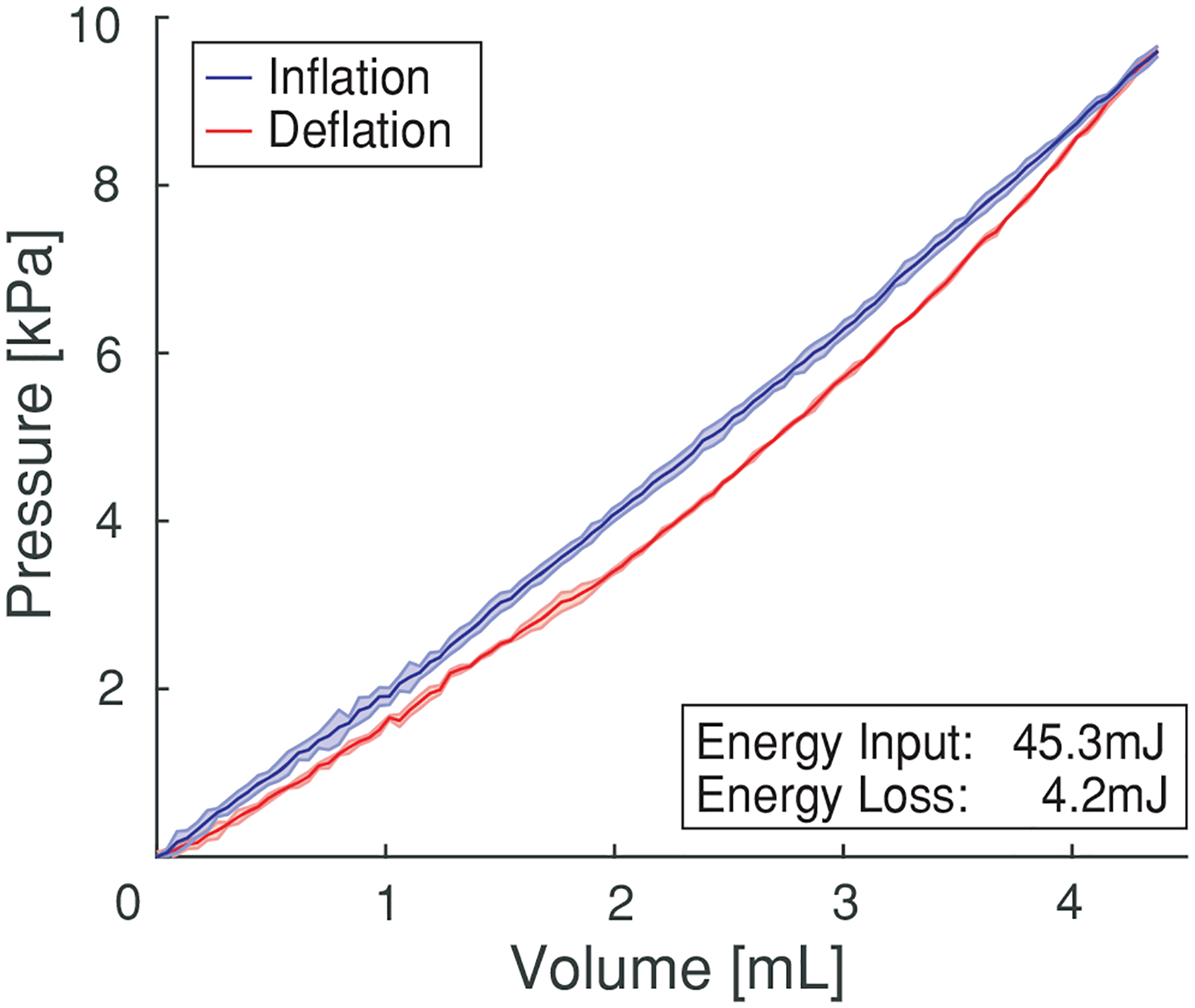
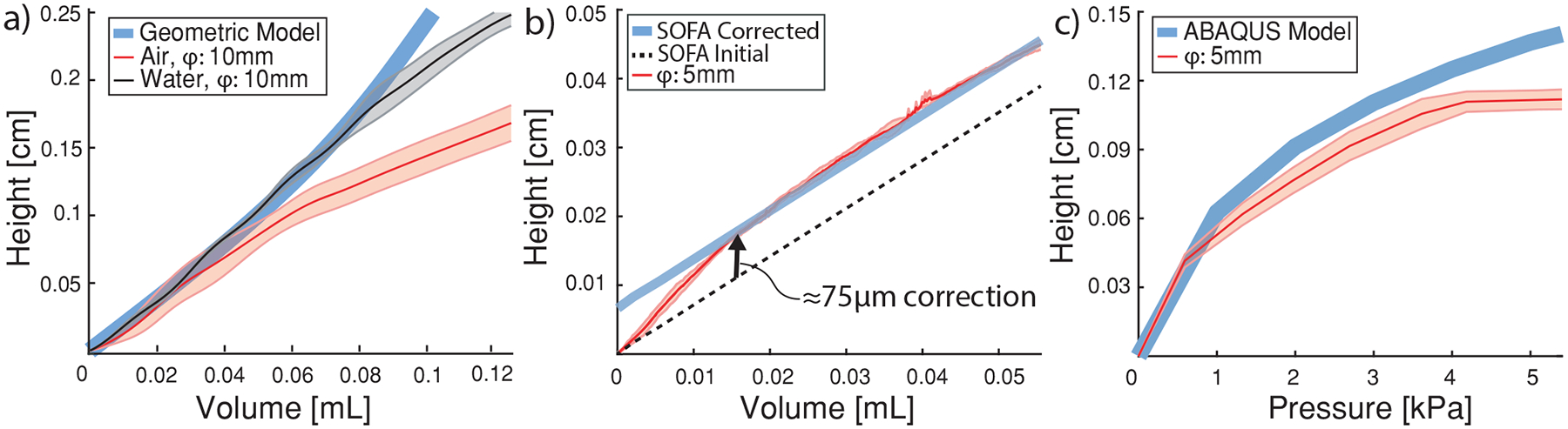
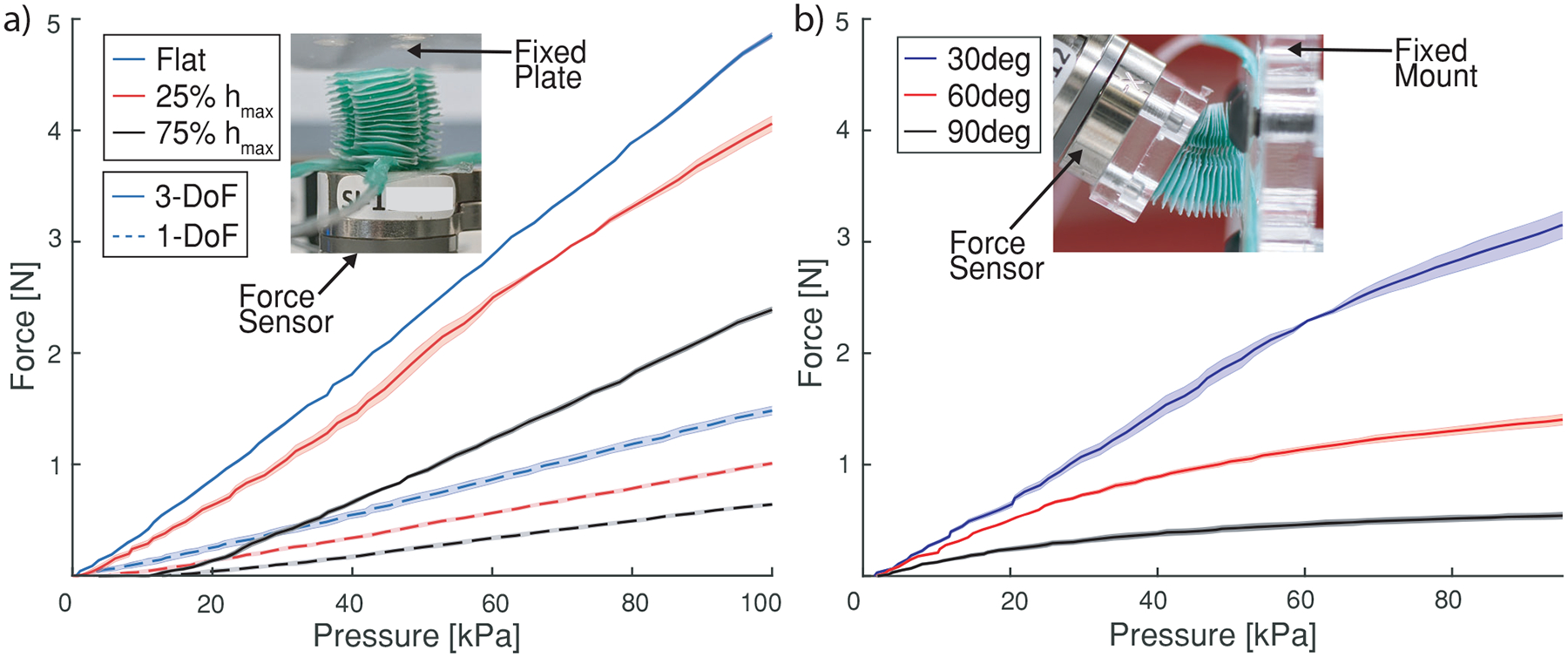
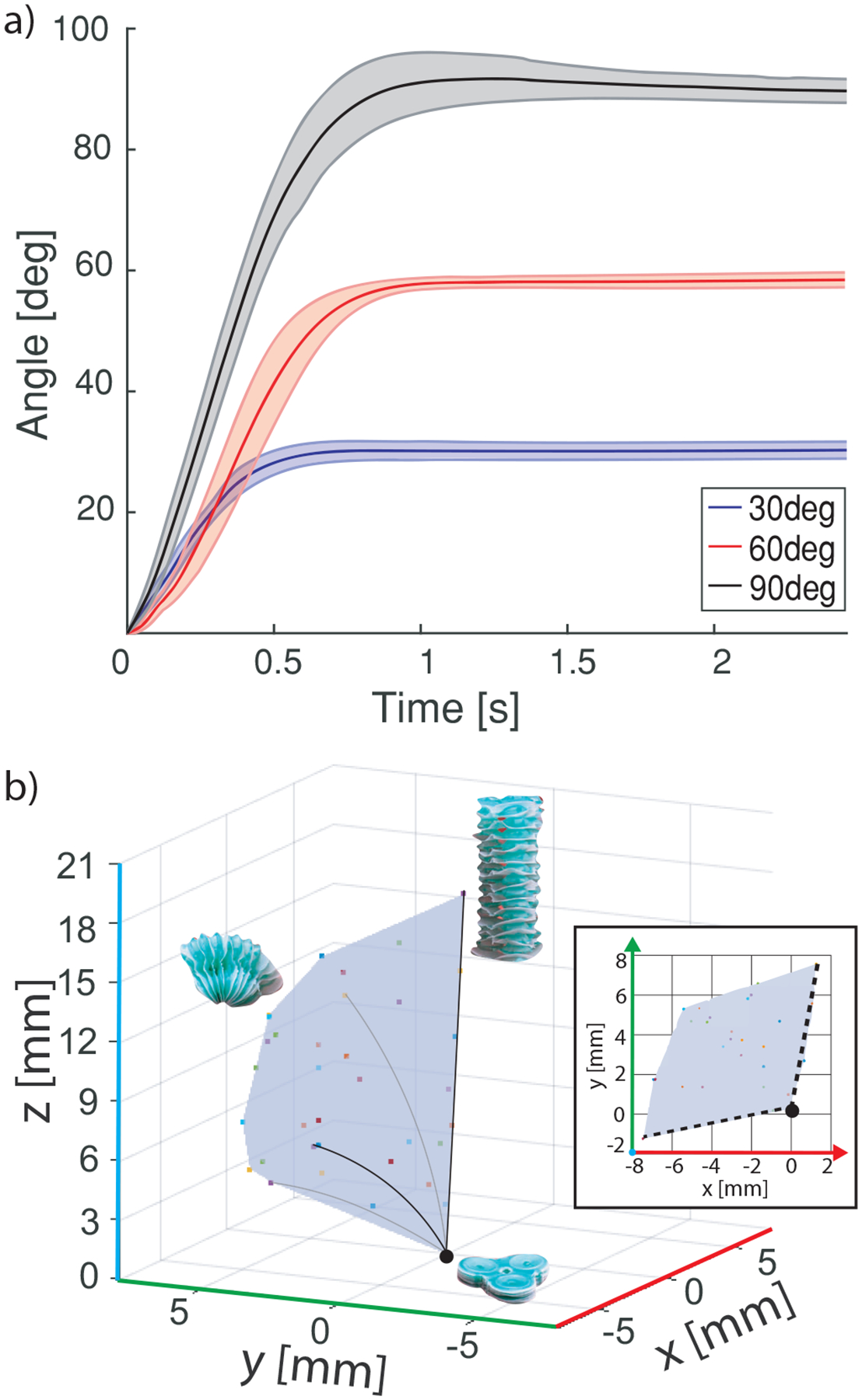
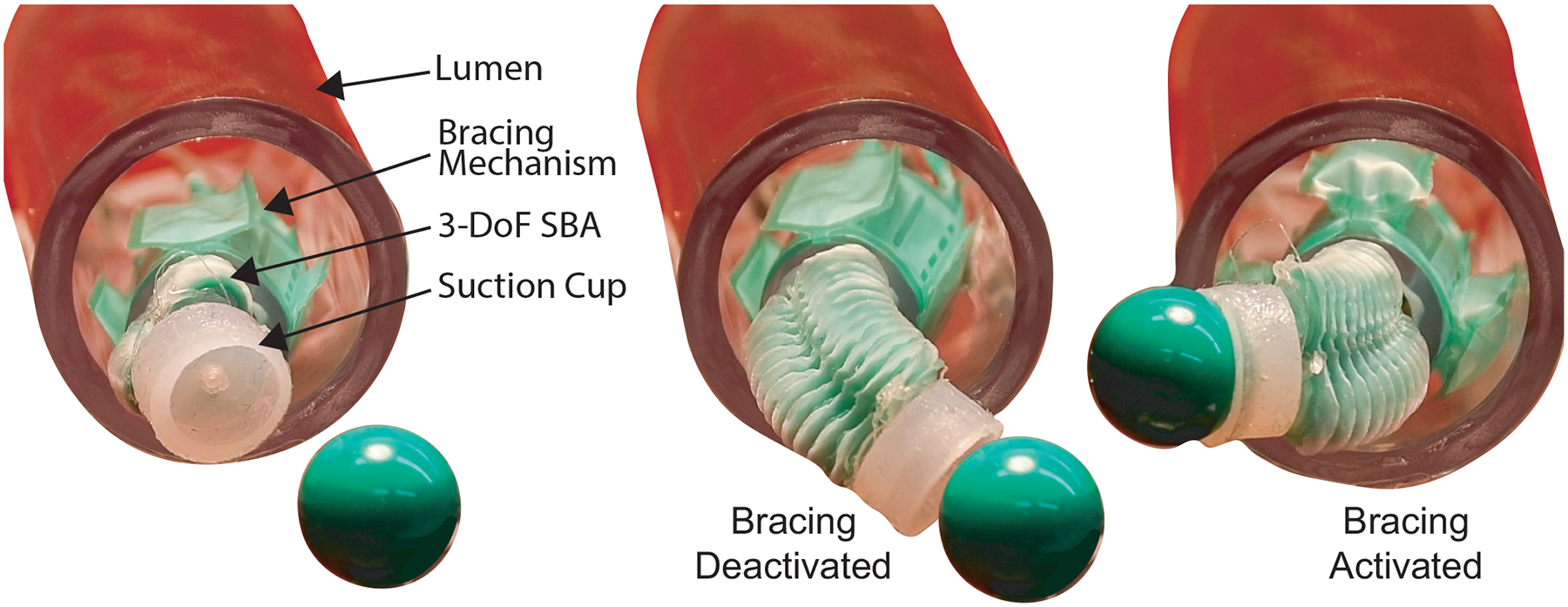
Complex environments, such as those found in surgical and search-and-rescue applications, require soft devices to adapt to minimal space conditions without sacrificing the ability to complete dexterous tasks. Stacked Balloon Actuators (SBAs) are capable of large deformations despite folding nearly flat when deflated, making them ideal candidates for such applications. This paper presents the design, fabrication, modeling, and characterization of monolithic, inflatable, soft SBAs. Modeling is presented using analytical principles based on geometry, and then using conventional and real-time finite element methods. Both one and three degree-of-freedom (DoF) SBAs are fully characterized with regards to stroke, force, and workspace. Finally, three representative demonstrations show the SBA's small-aperture navigation, bracing, and workspace-enhancing capabilities.
复杂环境,如手术和搜索救援应用中的环境,要求软设备在不牺牲完成灵巧任务能力的情况下适应极小的空间条件。堆叠式气球致动器(SBA)即使在放气时几乎折叠成扁平状,仍能产生大变形,使其成为此类应用的理想选择。本文介绍了整体式、可充气软SBA的设计、制造、建模和特性。建模首先基于几何原理采用解析方法,然后使用传统和实时有限元方法。对单自由度和三自由度的SBA在行程、力和工作空间方面进行了全面特性分析。最后,通过三个具有代表性的演示展示了SBA在小孔径导航、支撑和工作空间增强方面的能力。