Blumenschein Laura H, Coad Margaret M, Haggerty David A, Okamura Allison M, Hawkes Elliot W
Mechanical Engineering, Purdue University, West Lafayette, IN, United States.
Mechanical Engineering, Stanford University, Stanford, CA, United States.
Front Robot AI. 2020 Nov 10;7:548266. doi: 10.3389/frobt.2020.548266. eCollection 2020.
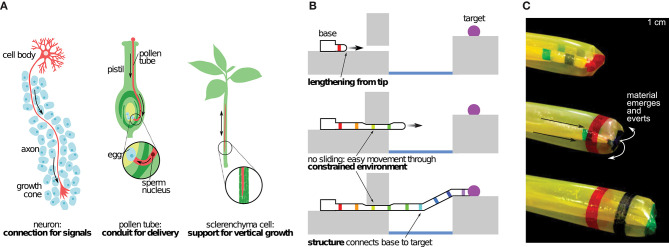
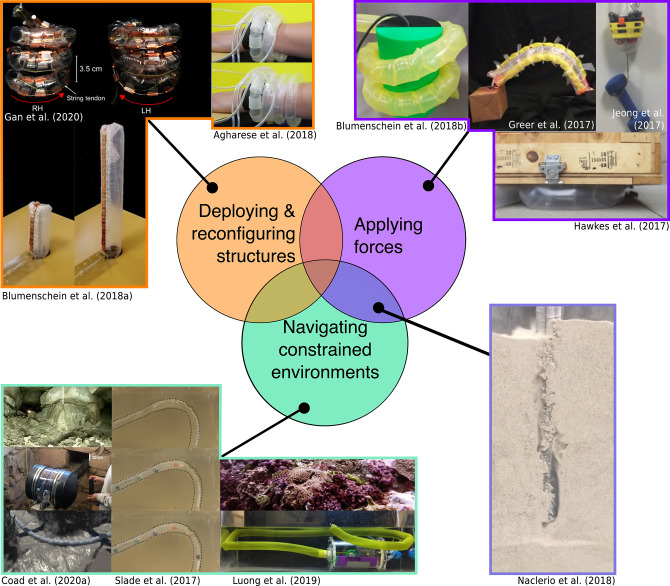
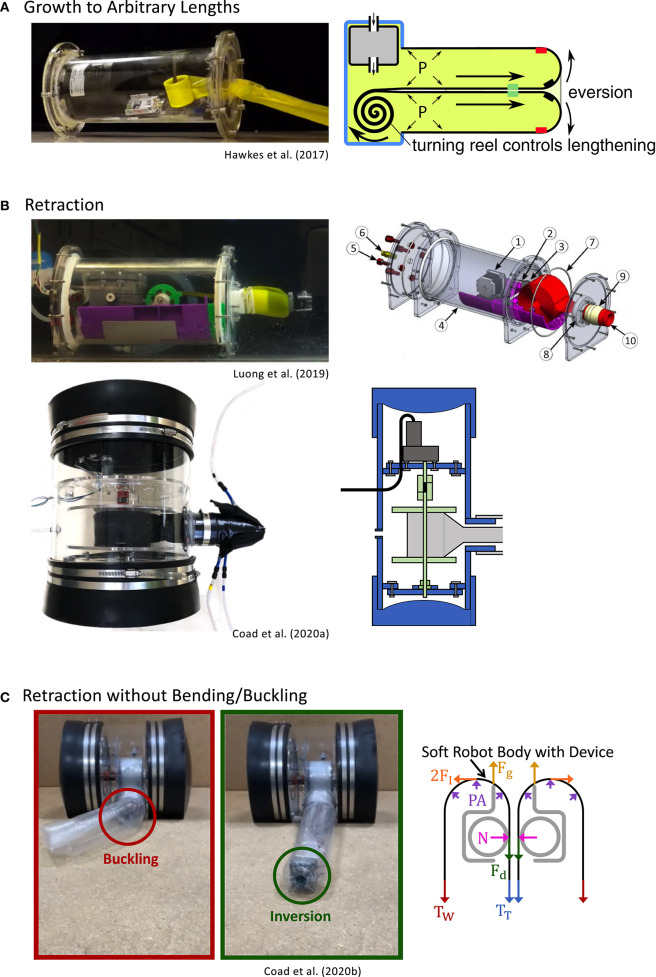
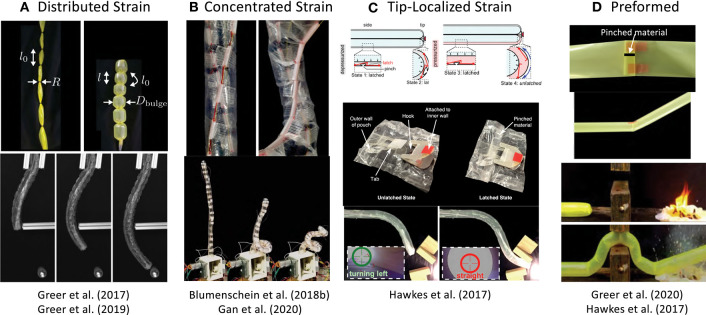
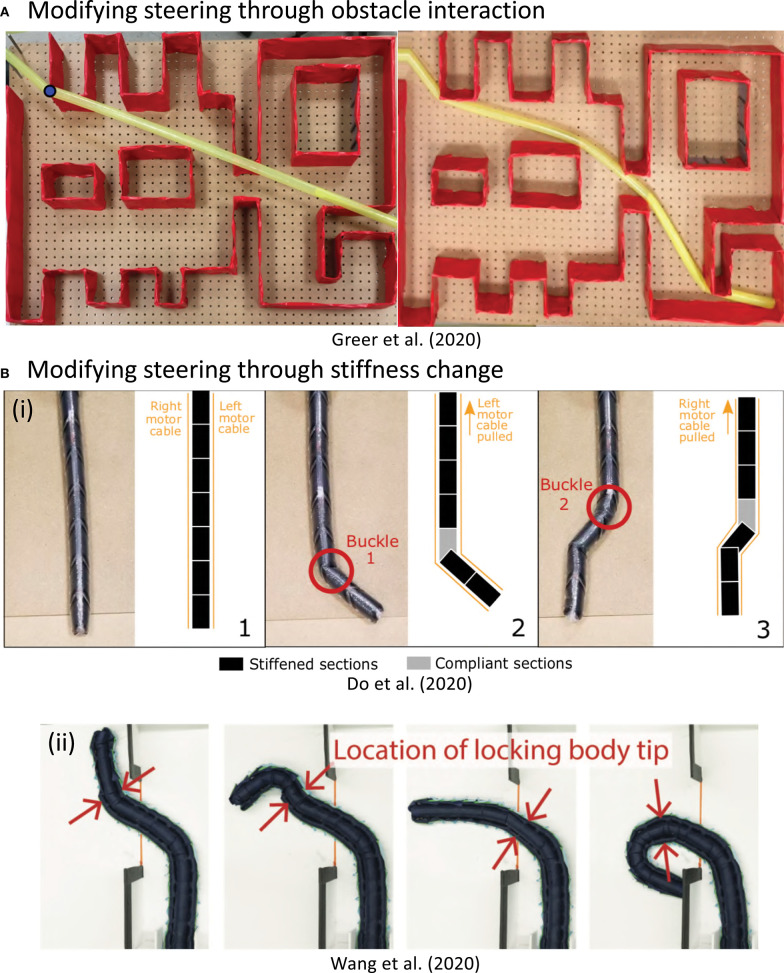
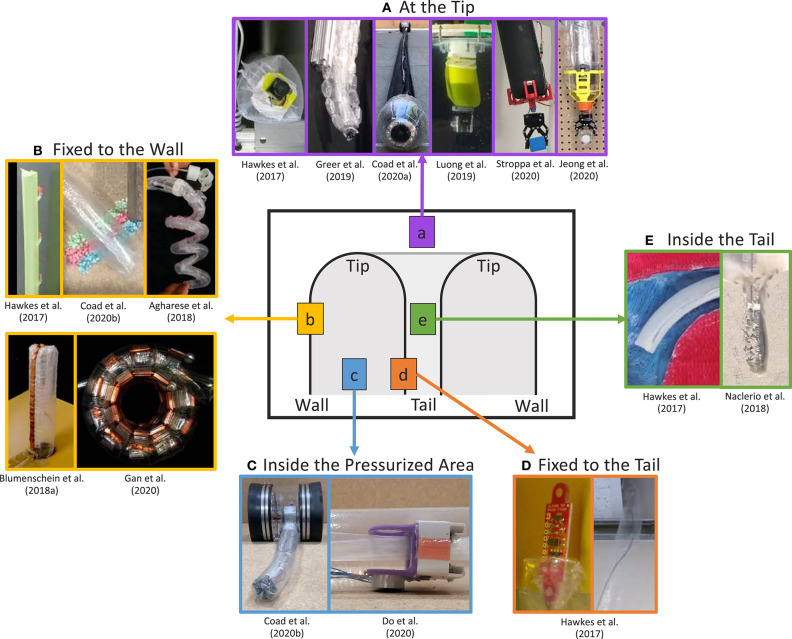
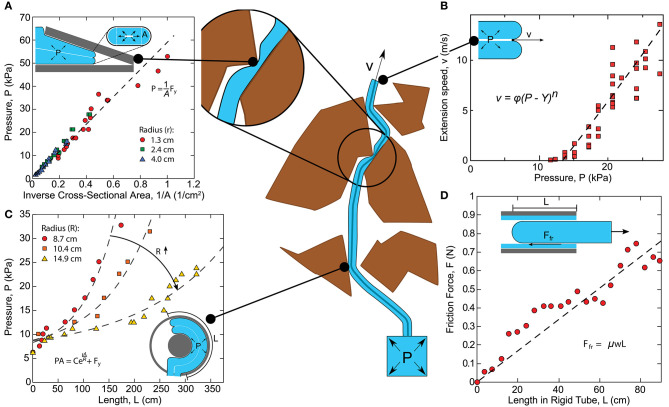
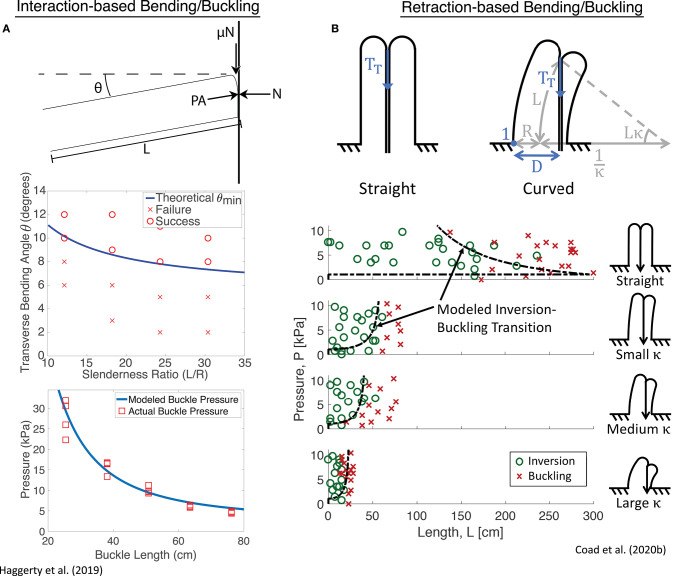
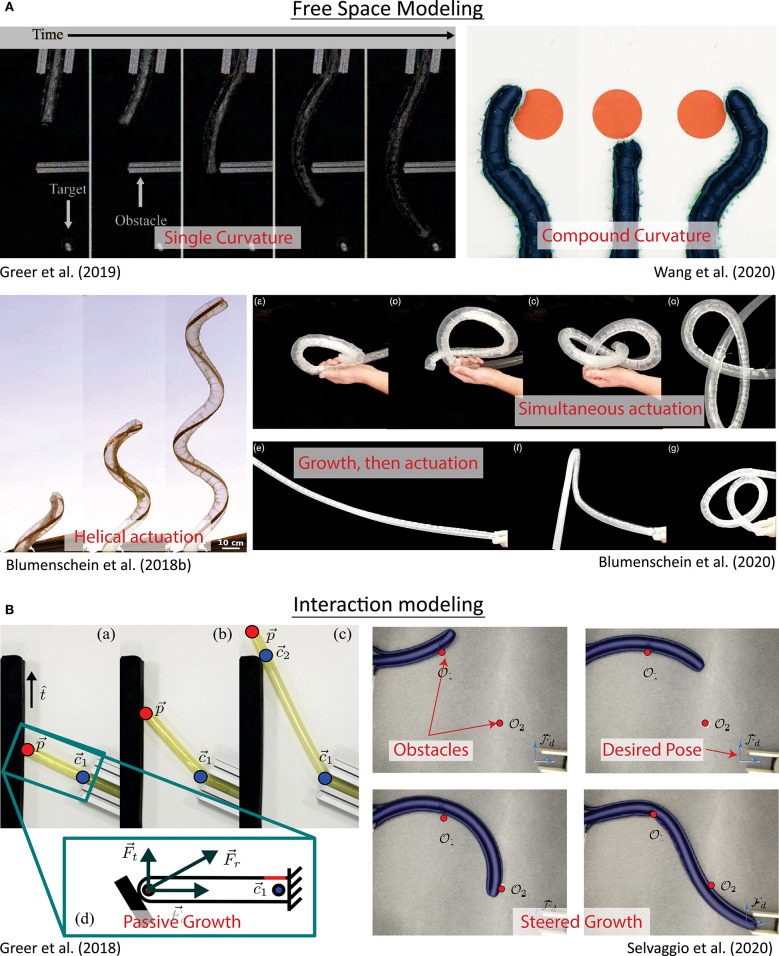
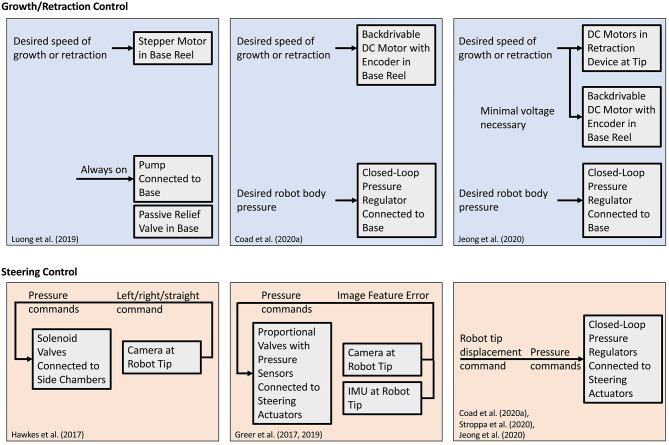
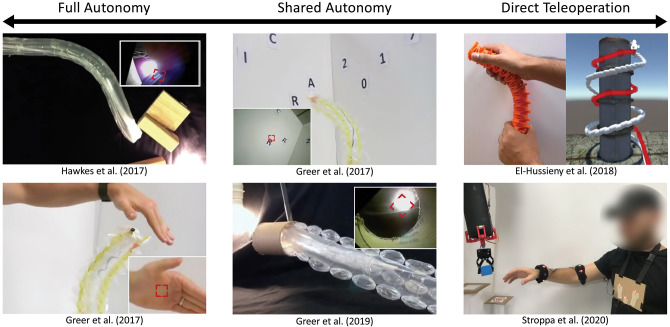
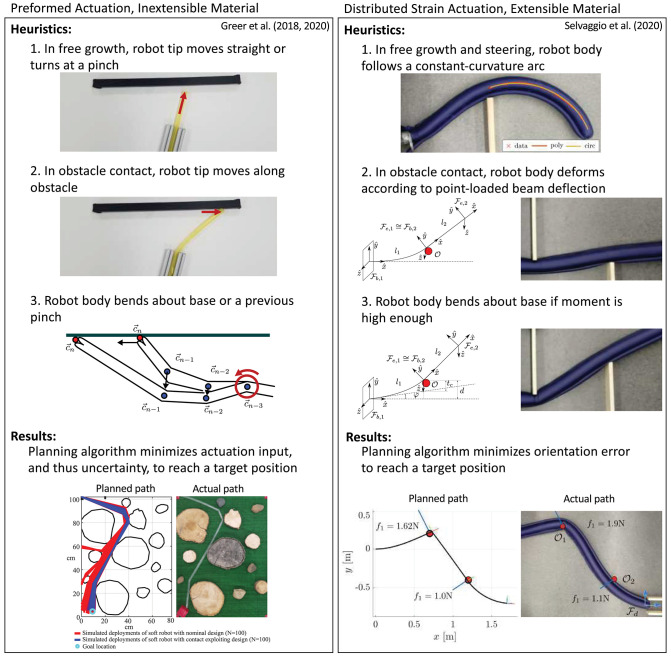
In nature, tip-localized growth allows navigation in tightly confined environments and creation of structures. Recently, this form of movement has been artificially realized through pressure-driven eversion of flexible, thin-walled tubes. Here we review recent work on robots that "grow" via pressure-driven eversion, referred to as "everting vine robots," due to a movement pattern that is similar to that of natural vines. We break this work into four categories. First, we examine the design of everting vine robots, highlighting tradeoffs in material selection, actuation methods, and placement of sensors and tools. These tradeoffs have led to application-specific implementations. Second, we describe the state of and need for modeling everting vine robots. Quasi-static models of growth and retraction and kinematic and force-balance models of steering and environment interaction have been developed that use simplifying assumptions and limit the involved degrees of freedom. Third, we report on everting vine robot control and planning techniques that have been developed to move the robot tip to a target, using a variety of modalities to provide reference inputs to the robot. Fourth, we highlight the benefits and challenges of using this paradigm of movement for various applications. Everting vine robot applications to date include deploying and reconfiguring structures, navigating confined spaces, and applying forces on the environment. We conclude by identifying gaps in the state of the art and discussing opportunities for future research to advance everting vine robots and their usefulness in the field.
在自然界中,尖端局部生长能够在狭窄的环境中进行导航并构建结构。最近,这种运动形式已通过压力驱动的柔性薄壁管外翻得以人工实现。在此,我们回顾了关于通过压力驱动外翻“生长”的机器人的近期研究工作,这些机器人由于其运动模式与天然藤蔓相似,故而被称为“外翻藤蔓机器人”。我们将这项工作分为四类。首先,我们研究外翻藤蔓机器人的设计,重点介绍材料选择、驱动方法以及传感器和工具放置方面的权衡。这些权衡导致了针对特定应用的实现方式。其次,我们描述了对外翻藤蔓机器人进行建模的现状和需求。已经开发出了生长和收缩的准静态模型以及转向和环境相互作用的运动学和力平衡模型,这些模型使用了简化假设并限制了所涉及的自由度。第三,我们报告了为将机器人尖端移动到目标而开发的外翻藤蔓机器人控制和规划技术,该技术使用多种方式为机器人提供参考输入。第四,我们强调了将这种运动范式用于各种应用的益处和挑战。迄今为止,外翻藤蔓机器人的应用包括部署和重新配置结构、在受限空间中导航以及对环境施加力。我们通过指出当前技术水平的差距并讨论未来研究的机会来推进外翻藤蔓机器人及其在该领域的实用性来得出结论。