Gholizadeh H, Lemaire E D, Salekrostam R
Ottawa Hospital Research Institute, Centre for Rehabilitation Research and Development, Ottawa, Canada.
Faculty of Medicine, University of Ottawa, Ottawa, Canada.
Can Prosthet Orthot J. 2020 Mar 20;2(2):32941. doi: 10.33137/cpoj.v2i2.32941. eCollection 2019.
Small residual limb-socket displacement is a good indicator of prosthetic suspension system quality. Active vacuum suspension systems can decrease vertical movement inside the socket, compared to non-active suction systems. This study mechanically evaluated limb-socket displacement with the Össur Unity active vacuum system.
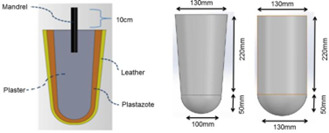
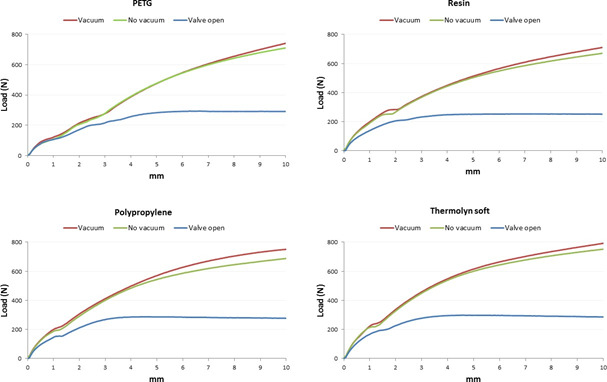
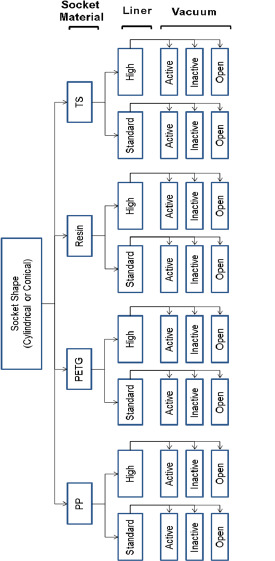
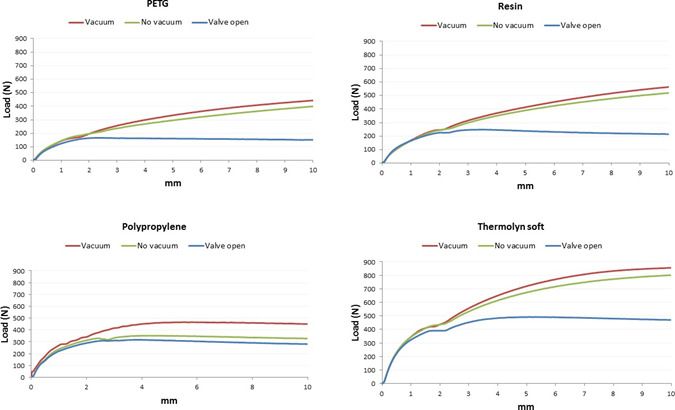
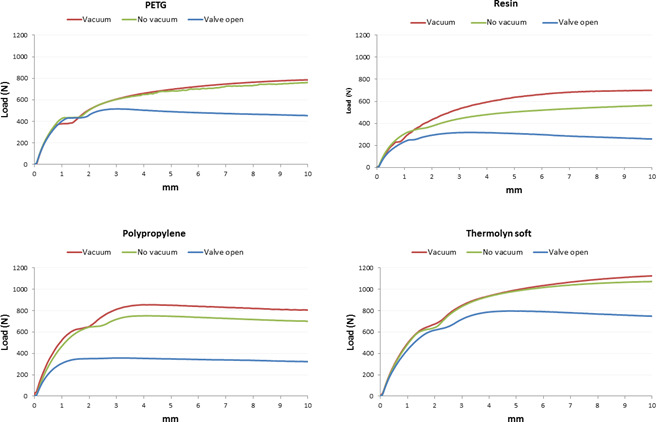
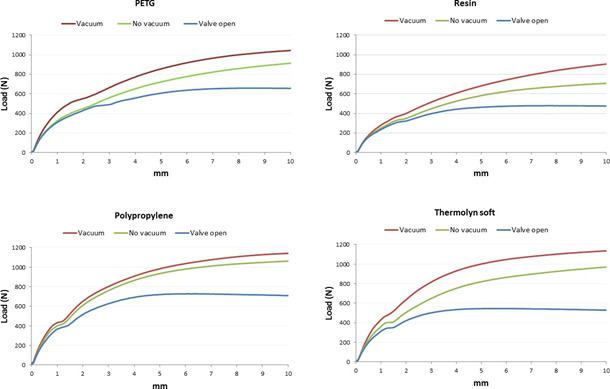
Forty-eight conditions were evaluated: four cylindrical and four conical sockets (polypropylene, polyethylene terephthalate glycol-modified (PETG), thermoset resin (acrylic), Thermolyn soft materials); two Iceross Seal-In V liners (standard, high profile); three vacuum conditions (active vacuum, inactive vacuum, no suction with valve open). An Instron 4428 test machine applied 0-100N linear ramped tensile loads to each positive mold, with the socket secured in place, while displacement between the mold and socket was recorded. Following the displacement tests, the load before failure (i.e., 10 mm displacement) was measured.
Average and standard deviations for movement between the mold and sockets were small. The displacement average for all conditions was 0.30±0.16mm for active vacuum, 0.32±0.16mm for inactive vacuum, and 0.39±0.22mm for no suction. Across all trials, active vacuum systems tolerated significantly (p<0.001) more load before failure (812±221N) compared to inactive vacuum (727±213N), and no suction (401±184N). The maximum load before failure (1142±53N) was for the cylindrical polypropylene socket and high-profile liner.
The Unity system successfully controlled pistoning inside the socket for regular activity loads and also controlled the greatest traction loads. While relative movement was smallest for Unity, all conditions (inactive vacuum, no suction) were viable for loads less than 100N. Furthermore, similar results can be achieved when using different socket fabrication materials.
小的残肢 - 接受腔位移是假肢悬吊系统质量的良好指标。与非主动抽吸系统相比,主动真空悬吊系统可减少接受腔内的垂直运动。本研究对奥索Unity主动真空系统的肢体 - 接受腔位移进行了力学评估。
评估了48种情况:四种圆柱形和四种圆锥形接受腔(聚丙烯、聚对苯二甲酸乙二醇酯二醇改性(PETG)、热固性树脂(丙烯酸)、Thermolyn软质材料);两种Iceross Seal - In V衬垫(标准型、高轮廓型);三种真空条件(主动真空、非主动真空、阀门打开无抽吸)。一台英斯特朗4428测试机对每个阳模施加0 - 100N的线性递增拉伸载荷,接受腔固定到位,同时记录模具与接受腔之间的位移。在位移测试之后,测量失效前的载荷(即10mm位移时的载荷)。
模具与接受腔之间的平均位移和标准差都很小。所有条件下的位移平均值,主动真空为0.30±0.16mm,非主动真空为0.32±0.16mm,无抽吸为0.39±0.22mm。在所有试验中,与非主动真空(727±213N)和无抽吸(401±184N)相比,主动真空系统在失效前能承受显著更多的载荷(p<0.001)(812±221N)。失效前的最大载荷(1142±53N)出现在圆柱形聚丙烯接受腔和高轮廓衬垫的情况下。
Unity系统成功控制了接受腔内的活塞运动,以适应常规活动载荷,并且也控制了最大的牵引载荷。虽然Unity的相对运动最小,但对于小于100N的载荷,所有条件(非主动真空、无抽吸)都是可行的。此外,使用不同的接受腔制造材料时可获得类似结果。