Yang Seon-Gyo, Lee Dong-Jun, Kim Chan, Jung Gwang-Pil
Department of Mechanical and Automotive Engineering, SeoulTech, Seoul 01811, Republic of Korea.
School of Mechanical and Aerospace Engineering, Seoul National University, Seoul 08826, Republic of Korea.
Biomimetics (Basel). 2023 Aug 1;8(4):339. doi: 10.3390/biomimetics8040339.
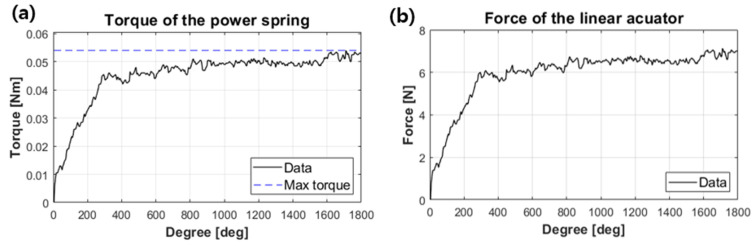
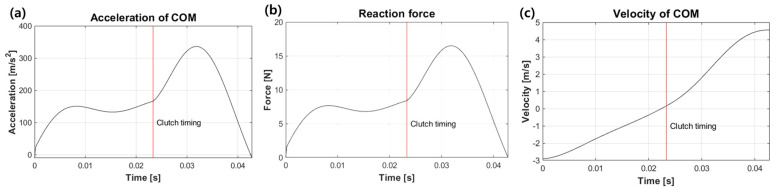
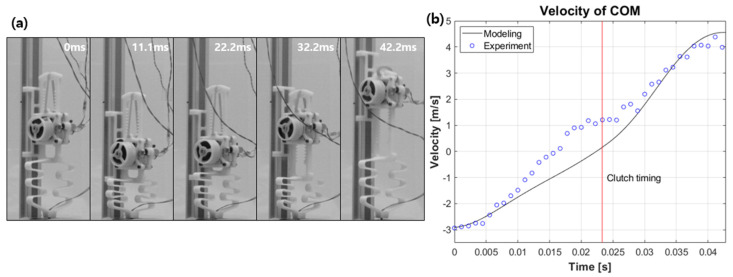
Hopping locomotion has the potential to enable small-scale robots to maneuver lands quickly while overcoming obstacles bigger than themselves. To make this possible, in this paper, we propose a novel design of a high-power linear actuator for a small-scale hopper. The key design principle of the linear actuator is to use a power spring and an active clutch. The power spring provides a near constant torque along the wide range of output displacement. The active clutch controls the moving direction and operation timing of the linear actuator, which enables the hopper to take off at the right timing. As a result, the hopper has a size of 143 mm, a mass of 45.9 g, and hops up to 0.58 m.
跳跃运动有潜力使小型机器人在克服比自身更大的障碍物的同时快速在陆地上机动。为了实现这一点,在本文中,我们提出了一种用于小型跳跃机器人的新型高功率线性致动器设计。线性致动器的关键设计原理是使用动力弹簧和主动离合器。动力弹簧在宽范围的输出位移上提供近乎恒定的扭矩。主动离合器控制线性致动器的移动方向和操作时机,这使得跳跃机器人能够在正确的时机起飞。结果,该跳跃机器人尺寸为143毫米,质量为45.9克,跳跃高度可达0.58米。