Huang Peile, Wang Shenghuai, Chen Jianyu, Li Weijie, Peng Xing
School of Mechanical Engineering, Hubei University of Automotive Technology, Shiyan 442002, China.
Sensors (Basel). 2023 Aug 11;23(16):7112. doi: 10.3390/s23167112.
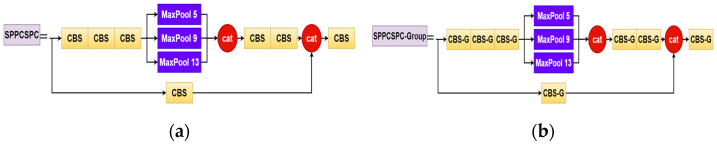
Existing pavement defect detection models face challenges in balancing detection accuracy and speed while being constrained by large parameter sizes, hindering deployment on edge terminal devices with limited computing resources. To address these issues, this paper proposes a lightweight pavement defect detection model based on an improved YOLOv7 architecture. The model introduces four key enhancements: first, the incorporation of the SPPCSPC_Group grouped space pyramid pooling module to reduce the parameter load and computational complexity; second, the utilization of the K-means clustering algorithm for generating anchors, accelerating model convergence; third, the integration of the Ghost Conv module, enhancing feature extraction while minimizing the parameters and calculations; fourth, introduction of the CBAM convolution module to enrich the semantic information in the last layer of the backbone network. The experimental results demonstrate that the improved model achieved an average accuracy of 91%, and the accuracy in detecting broken plates and repaired models increased by 9% and 8%, respectively, compared to the original model. Moreover, the improved model exhibited reductions of 14.4% and 29.3% in the calculations and parameters, respectively, and a 29.1% decrease in the model size, resulting in an impressive 80 FPS (frames per second). The enhanced YOLOv7 successfully balances parameter reduction and computation while maintaining high accuracy, making it a more suitable choice for pavement defect detection compared with other algorithms.
现有的路面缺陷检测模型在平衡检测精度和速度方面面临挑战,同时受到大参数规模的限制,这阻碍了其在计算资源有限的边缘终端设备上的部署。为了解决这些问题,本文提出了一种基于改进的YOLOv7架构的轻量级路面缺陷检测模型。该模型引入了四项关键改进:第一,引入SPPCSPC_Group分组空间金字塔池化模块以减少参数负载和计算复杂度;第二,利用K均值聚类算法生成锚框,加速模型收敛;第三,集成Ghost Conv模块,在最小化参数和计算量的同时增强特征提取;第四,引入CBAM卷积模块以丰富主干网络最后一层的语义信息。实验结果表明,改进后的模型平均准确率达到91%,与原始模型相比,检测破碎板块和修复模型的准确率分别提高了9%和8%。此外,改进后的模型计算量和参数分别减少了14.4%和29.3%,模型大小减小了29.1%,实现了令人印象深刻的80帧每秒。改进后的YOLOv7在保持高精度的同时成功平衡了参数减少和计算量,与其他算法相比,使其成为路面缺陷检测更合适的选择。