Li Feng, Kim Young-Chul, Xu Boyin
Department of Mechanical Engineering, Kunsan National University, Gunsan 54150, Jeollabuk, Republic of Korea.
College of Smart Manufacturing, Zhengzhou University of Economics and Business, Zhengzhou 450007, China.
Sensors (Basel). 2023 Aug 29;23(17):7502. doi: 10.3390/s23177502.
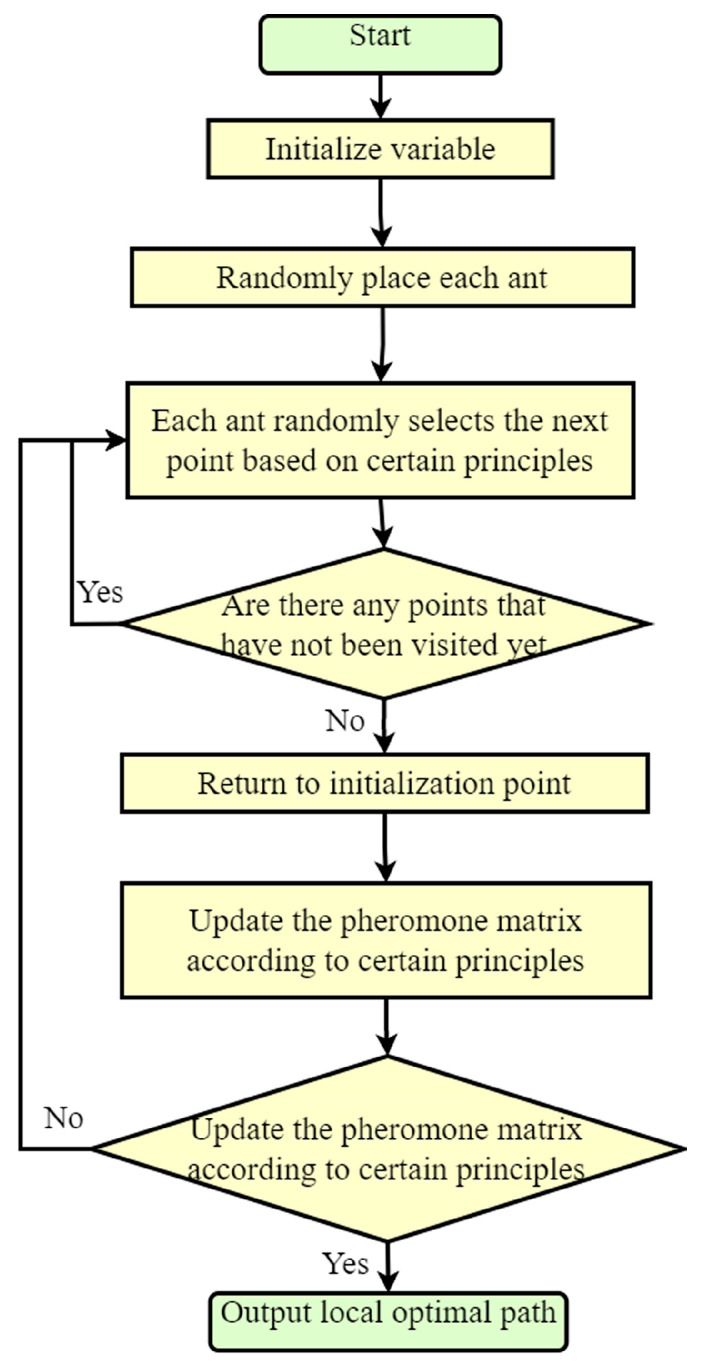
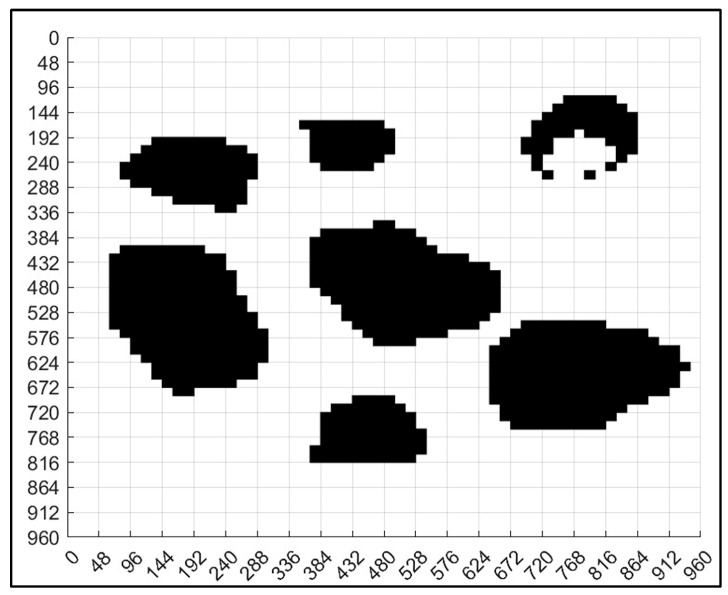
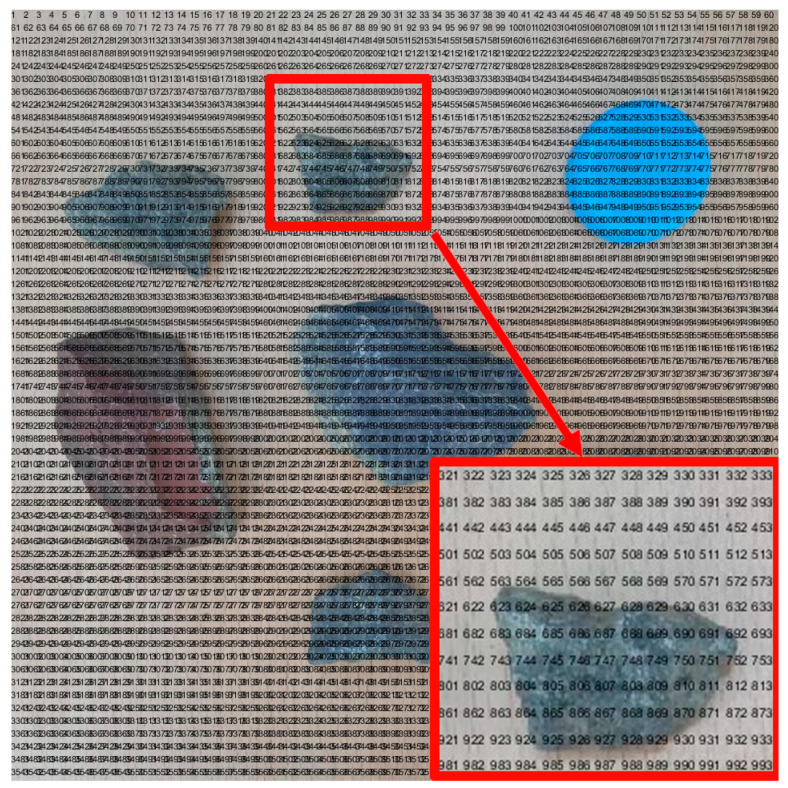
Robot path planning is an important component of ensuring the robots complete work tasks effectively. Nowadays, most maps used for robot path planning obtain relevant coordinate information through sensor measurement, establish a map model based on coordinate information, and then carry out path planning for the robot, which is time-consuming and labor-intensive. To solve this problem, a method of robot path planning based on ant colony algorithms after the standardized design of non-standard map grids such as photos was studied. This method combines the robot grid map modeling with image processing, bringing in calibration objects. By converting non-standard actual environment maps into standard grid maps, this method was made suitable for robot motion path planning on non-standard maps of different types and sizes. After obtaining the planned path and pose, the robot motion path planning map under the non-standard map was obtained by combining the planned path and pose with the non-standard real environment map. The experimental results showed that this method has a high adaptability to robot non-standard map motion planning, can realize robot path planning under non-standard real environment maps, and can make the obtained robot motion path display more intuitive and convenient.
机器人路径规划是确保机器人有效完成工作任务的重要组成部分。如今,大多数用于机器人路径规划的地图通过传感器测量获取相关坐标信息,基于坐标信息建立地图模型,然后为机器人进行路径规划,这既耗时又费力。为了解决这个问题,研究了一种在对照片等非标准地图网格进行标准化设计后基于蚁群算法的机器人路径规划方法。该方法将机器人网格地图建模与图像处理相结合,引入了校准对象。通过将非标准的实际环境地图转换为标准网格地图,使该方法适用于不同类型和大小的非标准地图上的机器人运动路径规划。在获得规划路径和位姿后,将规划路径和位姿与非标准真实环境地图相结合,得到非标准地图下的机器人运动路径规划图。实验结果表明,该方法对机器人非标准地图运动规划具有较高的适应性,能够实现非标准真实环境地图下的机器人路径规划,并且能够使得到的机器人运动路径显示更加直观和便捷。