Ge Hao, Ying Zhanfeng, Chen Zhihua, Zu Wei, Liu Chunzheng, Jin Yicong
National Key Laboratory of Transient Physics, Nanjing University of Science & Technology, Nanjing 210094, China.
School of Energy and Power Engineering, Nanjing University of Science & Technology, Nanjing 210094, China.
Sensors (Basel). 2023 Aug 11;23(16):7115. doi: 10.3390/s23167115.
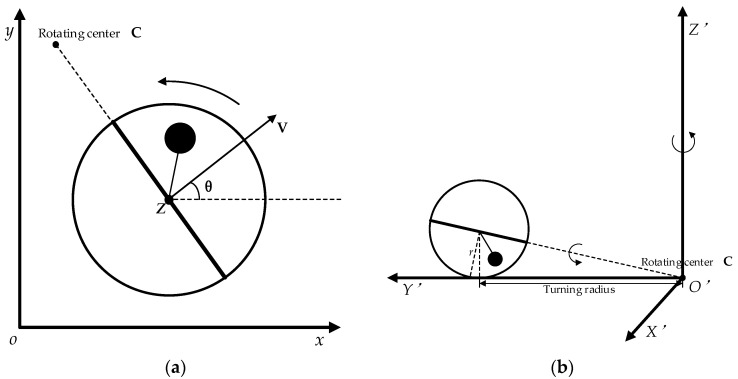
Spherical robots have fully wrapped shells, which enables them to walk well on complex terrains, such as swamps, grasslands and deserts. At present, path planning algorithms for spherical robots mainly focus on finding the shortest path between the initial position and the target position. In this paper, an improved A* algorithm considering energy consumption is proposed for the path planning of spherical robots. The optimization objective of this algorithm is to minimize both the energy consumption and path length of a spherical robot. A heuristic function constructed with the energy consumption estimation model (ECEM) and the distance estimation model (DEM) is used to determine the path cost of the A* algorithm. ECEM and DCM are established based on the force analysis of the spherical robot and the improved Euclidean distance of the grid map, respectively. The effectiveness of the proposed algorithm is verified by simulation analysis based on a 3D grid map and a spherical robot moving with uniform velocity. The results show that compared with traditional path planning algorithms, the proposed algorithm can minimize the energy consumption and path length of the spherical robot as much as possible.
球形机器人具有全包裹式外壳,这使其能够在诸如沼泽、草原和沙漠等复杂地形上良好行走。目前,球形机器人的路径规划算法主要集中于寻找初始位置与目标位置之间的最短路径。本文针对球形机器人的路径规划提出了一种考虑能量消耗的改进A算法。该算法的优化目标是使球形机器人的能量消耗和路径长度均最小化。利用由能量消耗估计模型(ECEM)和距离估计模型(DEM)构建的启发式函数来确定A算法的路径代价。ECEM和DCM分别基于球形机器人的受力分析和网格地图的改进欧几里得距离建立。基于三维网格地图和匀速移动的球形机器人进行仿真分析,验证了所提算法的有效性。结果表明,与传统路径规划算法相比,所提算法能够尽可能地使球形机器人的能量消耗和路径长度最小化。