Reveles-Gómez Luis C, Luna-García Huizilopoztli, Celaya-Padilla José M, Barría-Huidobro Cristian, Gamboa-Rosales Hamurabi, Solís-Robles Roberto, Arceo-Olague José G, Galván-Tejada Jorge I, Galván-Tejada Carlos E, Rondon David, Villalba-Condori Klinge O
Unidad Académica de Ingeniería Eléctrica, Universidad Autónoma de Zacatecas, Jardín Juarez 147, Centro, Zacatecas 98000, Mexico.
Centro de Investigación en Ciberseguridad, Universidad Mayor de Chile, Manuel Montt 367, Providencia 7500628, Chile.
Sensors (Basel). 2023 Aug 31;23(17):7559. doi: 10.3390/s23177559.
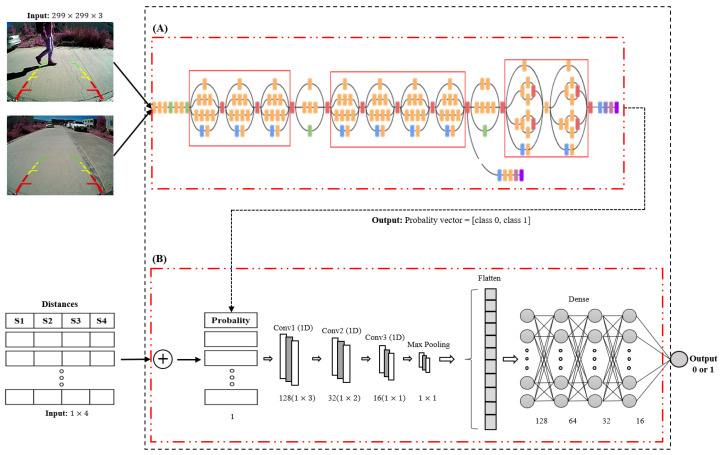
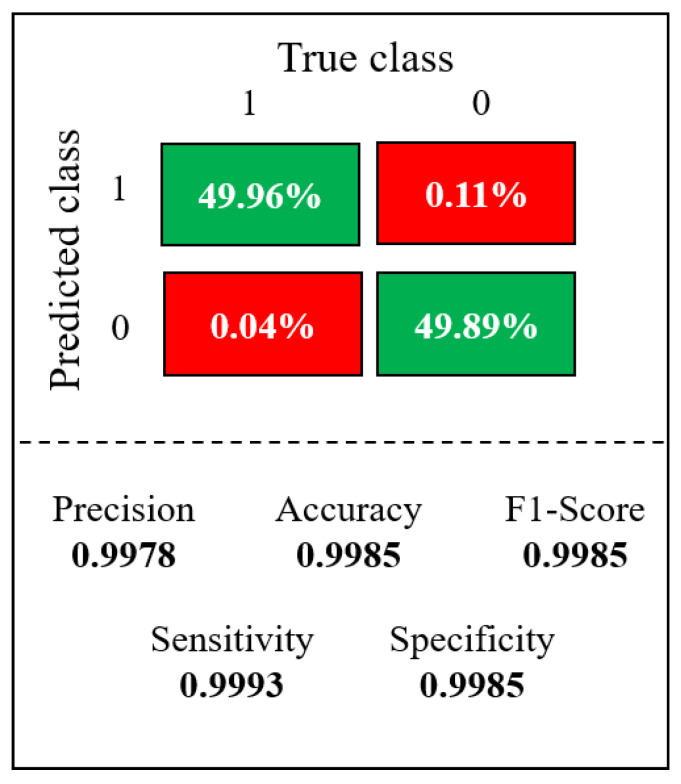
In recent years, the application of artificial intelligence (AI) in the automotive industry has led to the development of intelligent systems focused on road safety, aiming to improve protection for drivers and pedestrians worldwide to reduce the number of accidents yearly. One of the most critical functions of these systems is pedestrian detection, as it is crucial for the safety of everyone involved in road traffic. However, pedestrian detection goes beyond the front of the vehicle; it is also essential to consider the vehicle's rear since pedestrian collisions occur when the car is in reverse drive. To contribute to the solution of this problem, this research proposes a model based on convolutional neural networks (CNN) using a proposed one-dimensional architecture and the Inception V3 architecture to fuse the information from the backup camera and the distance measured by the ultrasonic sensors, to detect pedestrians when the vehicle is reversing. In addition, specific data collection was performed to build a database for the research. The proposed model showed outstanding results with 99.85% accuracy and 99.86% correct classification performance, demonstrating that it is possible to achieve the goal of pedestrian detection using CNN by fusing two types of data.
近年来,人工智能(AI)在汽车行业的应用推动了专注于道路安全的智能系统的发展,旨在提高全球范围内对驾驶员和行人的保护,以减少每年的事故数量。这些系统最关键的功能之一是行人检测,因为这对道路交通中所有相关人员的安全至关重要。然而,行人检测不仅限于车辆前方;考虑车辆后方也很重要,因为当汽车倒车时会发生行人碰撞。为了有助于解决这个问题,本研究提出了一种基于卷积神经网络(CNN)的模型,该模型使用一种提议的一维架构和Inception V3架构来融合来自倒车摄像头和超声波传感器测量距离的信息,以便在车辆倒车时检测行人。此外,还进行了特定的数据收集以构建用于该研究的数据库。所提出的模型显示出出色的结果,准确率为99.85%,正确分类性能为99.86%,表明通过融合两种类型的数据,使用CNN实现行人检测的目标是可行的。