Tang Xinyao, Wang Xupeng, Xue Yanmin, Wei Pingping
School of Mechanical and Precision Instrument Engineering, Xi'an University of Technology, Xi'an 710048, China.
Research Center for Civil-Military Integration and Protection Equipment Design Innovation, Xi'an University of Technology, Xi'an 710054, China.
Micromachines (Basel). 2023 Sep 22;14(10):1812. doi: 10.3390/mi14101812.
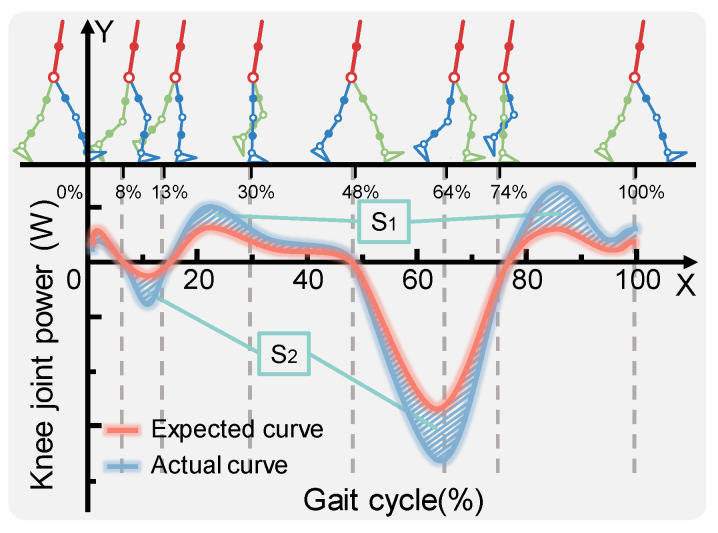
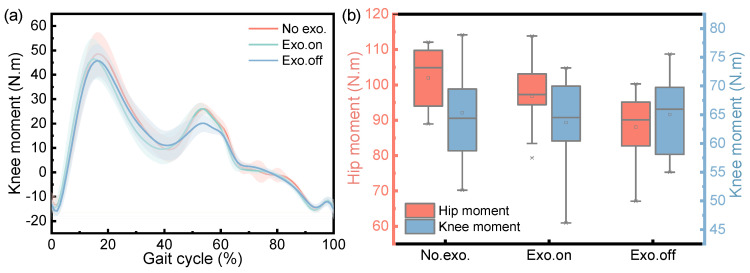
In order to reduce the energy consumption of human daily movement without providing additional power, we considered the biomechanical behavior of the knee during external impedance interactions. Based on the theory of human sports biomechanics, combined with the requirements of human-machine coupling motion consistency and coordination, an unpowered exoskeleton-assisted device for the knee joint is proposed in this paper. The effectiveness of this assisted device was verified using gait experiments and distributed plantar pressure tests with three modes: "not wearing exoskeleton" (No exo.), "wearing exoskeleton with assistance " (Exo. On), and "wearing exoskeleton without assistance" (Exo. Off). The experimental results indicate that (1) This device can effectively enhance the function of the knee, increasing the range of knee movement by 3.72% ( < 0.001). (2) In the early stages of the lower limb swing, this device reduces the activity of muscles in relation to the knee flexion, such as the rectus femoris, vastus lateralis, and soleus muscles. (3) For the first time, it was found that the movement length of the plantar pressure center was reduced by 6.57% ( = 0.027). This basic principle can be applied to assist the in-depth development of wearable devices.
为了在不提供额外动力的情况下降低人类日常活动的能量消耗,我们研究了膝关节在外部阻抗相互作用过程中的生物力学行为。基于人类运动生物力学理论,结合人机耦合运动一致性与协调性要求,本文提出了一种膝关节无动力外骨骼辅助装置。通过“不穿戴外骨骼”(无外骨骼)、“穿戴外骨骼并开启辅助”(外骨骼开启)和“穿戴外骨骼但不开启辅助”(外骨骼关闭)三种模式的步态实验和足底压力分布测试,验证了该辅助装置的有效性。实验结果表明:(1)该装置能有效增强膝关节功能,使膝关节活动范围增加3.72%(<0.001)。(2)在下肢摆动初期,该装置降低了与膝关节屈曲相关肌肉的活动,如股直肌、股外侧肌和比目鱼肌。(3)首次发现足底压力中心的移动长度减少了6.57%(=0.027)。这一基本原理可应用于辅助可穿戴设备的深入研发。