Tang Xinyao, Wang Xupeng, Ji Xiaomin, Zhou Yawen, Yang Jie, Wei Yuchen, Zhang Wenjie
School of Mechanical and Precision Instrument Engineering, Xi'an University of Technology, Xi'an 710048, China.
Research Center for Civil-Military Integration and Protection Equipment Design Innovation, Xi'an University of Technology, Xi'an 710054, China.
Micromachines (Basel). 2022 Jun 6;13(6):900. doi: 10.3390/mi13060900.
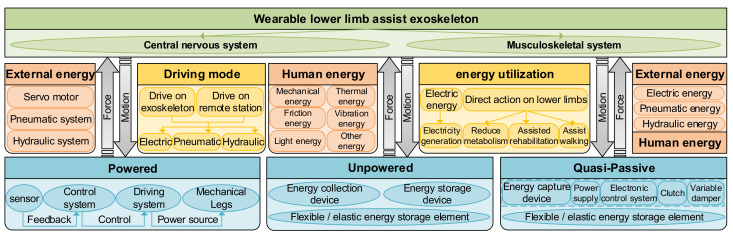
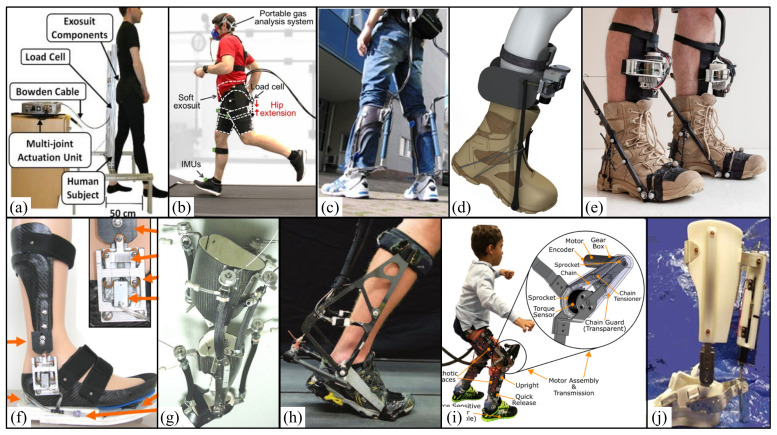
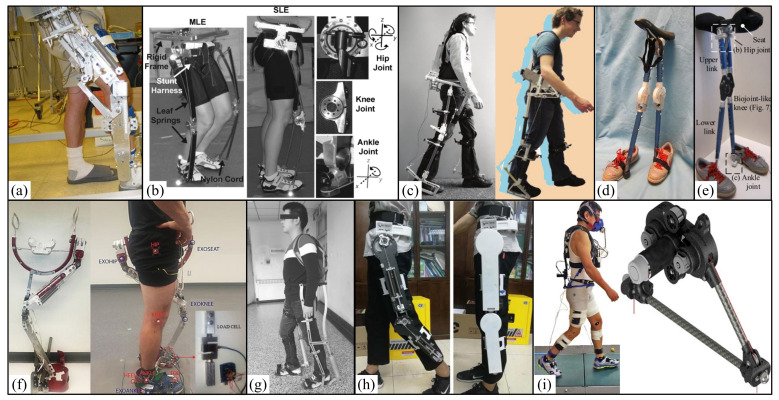
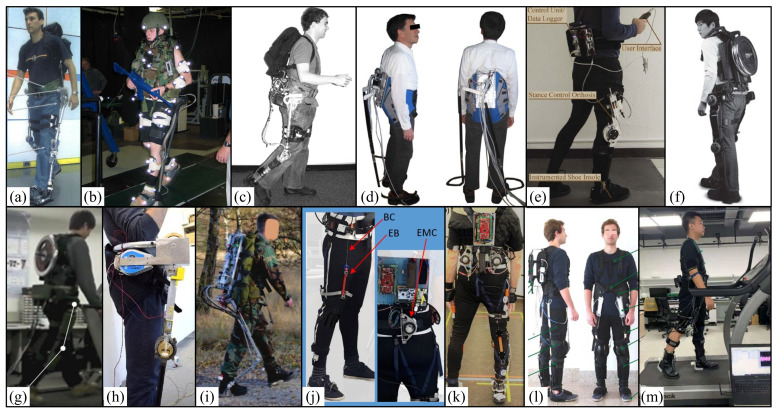
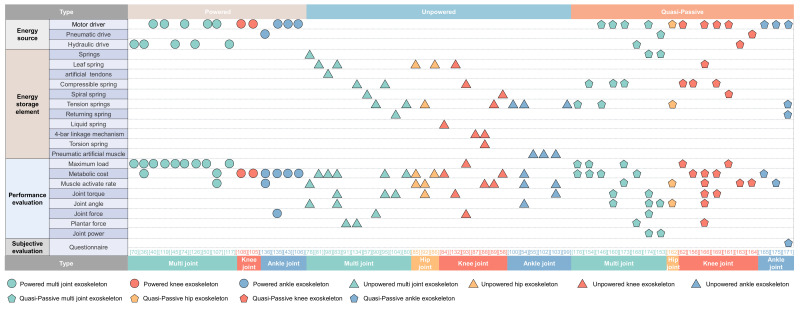
Human body enhancement is an interesting branch of robotics. It focuses on wearable robots in order to improve the performance of human body, reduce energy consumption and delay fatigue, as well as increase body speed. Robot-assisted equipment, such as wearable exoskeletons, are wearable robot systems that integrate human intelligence and robot power. After careful design and adaptation, the human body has energy-saving sports, but it is an arduous task for the exoskeleton to achieve considerable reduction in metabolic rate. Therefore, it is necessary to understand the biomechanics of human sports, the body, and its weaknesses. In this study, a lower limb exoskeleton was classified according to the power source, and the working principle, design idea, wearing mode, material and performance of different types of lower limb exoskeletons were compared and analyzed. The study shows that the unpowered exoskeleton robot has inherent advantages in endurance, mass, volume, and cost, which is a new development direction of robot exoskeletons. This paper not only summarizes the existing research but also points out its shortcomings through the comparative analysis of different lower limb wearable exoskeletons. Furthermore, improvement measures suitable for practical application have been provided.
人体增强是机器人技术中一个有趣的分支。它专注于可穿戴机器人,以提高人体性能、降低能量消耗、延缓疲劳以及提高身体速度。机器人辅助设备,如可穿戴外骨骼,是整合了人类智能和机器人动力的可穿戴机器人系统。经过精心设计和适配,人体能够进行节能运动,但对于外骨骼来说,要实现代谢率的显著降低是一项艰巨的任务。因此,有必要了解人体运动的生物力学、身体及其弱点。在本研究中,根据动力源对下肢外骨骼进行了分类,并对不同类型下肢外骨骼的工作原理、设计理念、穿戴方式、材料和性能进行了比较分析。研究表明,无动力外骨骼机器人在耐力、质量、体积和成本方面具有固有优势,这是机器人外骨骼的一个新的发展方向。本文不仅总结了现有研究,还通过对不同下肢可穿戴外骨骼的比较分析指出了其不足之处。此外,还提供了适用于实际应用的改进措施。