Yang Youwei, Meng Lingxian, Zhang Juzhong, Gao Yadong, Hao Zijuan, Liu Yang, Niu Mingjun, Zhang Xiaomeng, Liu Xuying, Liu Shuiren
School of Materials Science and Engineering, Zhengzhou University, Zhengzhou, 450001, P. R. China.
School of Chemical Engineering, Zhengzhou University, Zhengzhou, 450001, P. R. China.
Adv Sci (Weinh). 2024 Jan;11(2):e2307862. doi: 10.1002/advs.202307862. Epub 2023 Nov 20.
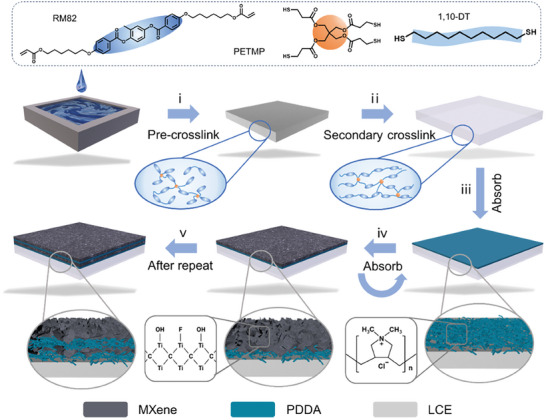
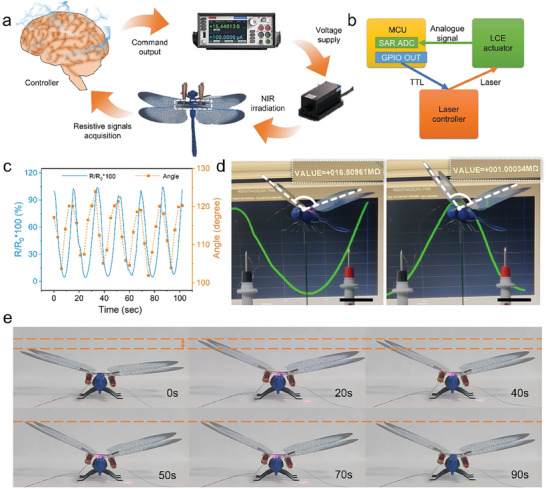
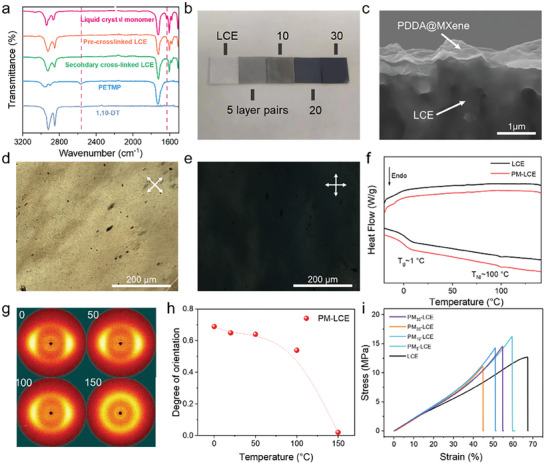
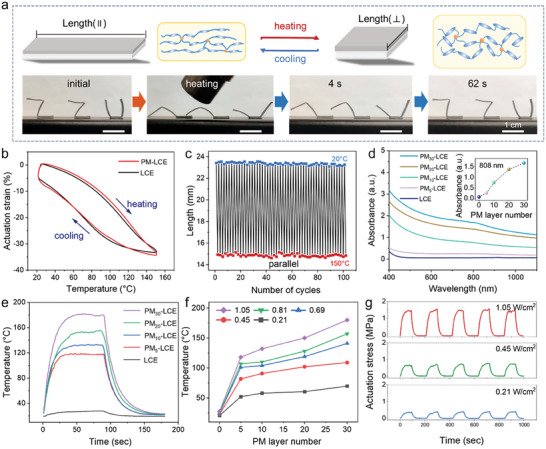
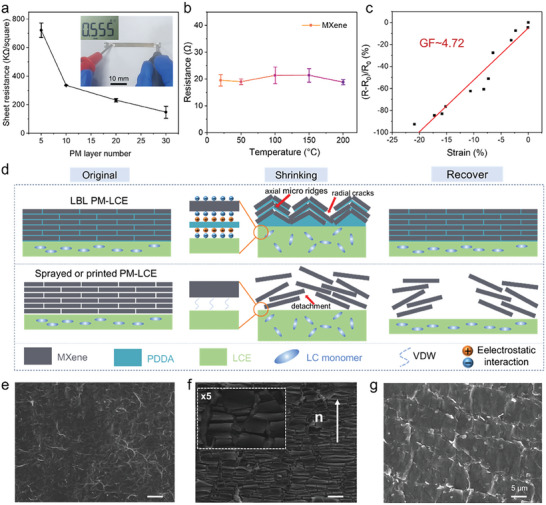
More recently, soft actuators have evoked great interest in the next generation of soft robots. Despite significant progress, the majority of current soft actuators suffer from the lack of real-time sensory feedback and self-control functions, prohibiting their effective sensing and multitasking functions. Therefore, in this work, a near-infrared-driven bimorph membrane, with self-sensing and feedback loop control functions, is produced by layer by layer (LBL) assembling MXene/PDDA (PM) onto liquid crystal elastomer (LCE) film. The versatile integration strategy successfully prevents the separation issues that arise from moduli mismatch between the sensing and the actuating layers, ultimately resulting in a stable and tightly bonded interface adhesion. As a result, the resultant membrane exhibited excellent mechanical toughness (tensile strengths equal to 16.3 MPa (||)), strong actuation properties (actuation stress equal to 1.56 MPa), and stable self-sensing (gauge factor equal to 4.72) capabilities. When applying the near-infrared (NIR) laser control, the system can perform grasping, traction, and crawling movements. Furthermore, the wing actuation and the closed-loop controlled motion are demonstrated in combination with the insect microcontroller unit (MCU) models. The remote precision control and the self-sensing capabilities of the soft actuator pave a way for complex and precise task modulation in the future.
最近,软驱动器在下一代软机器人领域引起了极大的关注。尽管取得了重大进展,但目前大多数软驱动器仍缺乏实时传感反馈和自我控制功能,这限制了它们的有效传感和多任务功能。因此,在这项工作中,通过将MXene/聚二烯丙基二甲基氯化铵(PM)逐层组装到液晶弹性体(LCE)薄膜上,制备了一种具有自传感和反馈回路控制功能的近红外驱动双压电薄膜。这种通用的集成策略成功地防止了传感层和驱动层之间模量不匹配引起的分离问题,最终形成了稳定且紧密结合的界面粘附。结果,所得薄膜表现出优异的机械韧性(拉伸强度等于16.3MPa(||))、强大的驱动性能(驱动应力等于1.56MPa)和稳定的自传感(应变片系数等于4.72)能力。当应用近红外(NIR)激光控制时,该系统能够执行抓取、牵引和爬行运动。此外,结合昆虫微控制器单元(MCU)模型展示了翅膀驱动和闭环控制运动。软驱动器的远程精确控制和自传感能力为未来复杂精确的任务调制铺平了道路。