Li Ze, Cheung Chi Fai, Lam Kin Man, Lun Daniel Pak Kong
State Key Laboratory of Ultra-Precision Machining Technology, Department of Industrial and Systems Engineering, The Hong Kong Polytechnic University, Hong Kong, China.
Department of Electrical and Electronic Engineering, The Hong Kong Polytechnic University, Hong Kong, China.
Sensors (Basel). 2024 Jan 10;24(2):421. doi: 10.3390/s24020421.
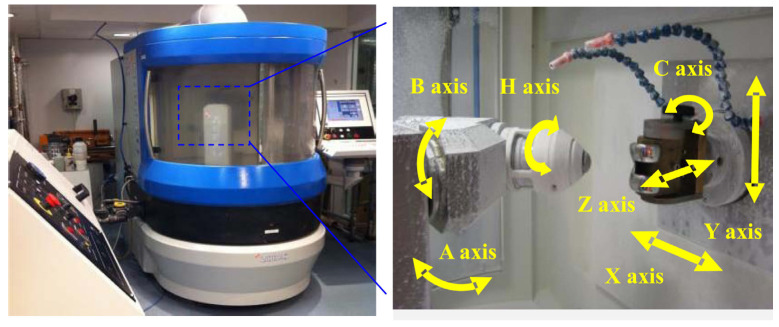
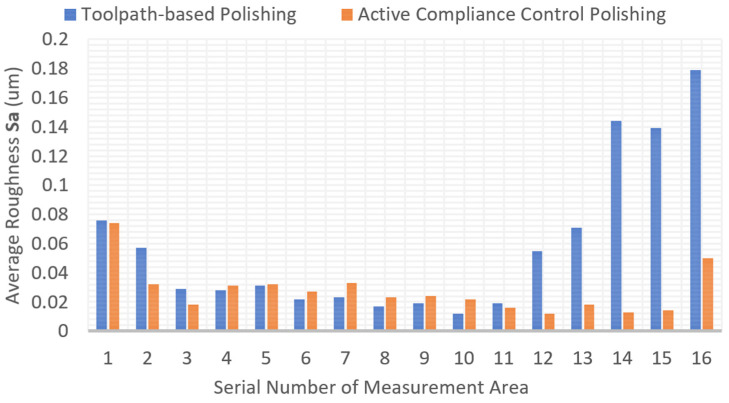
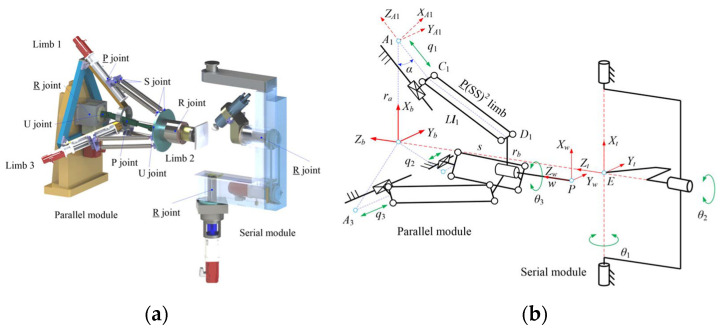
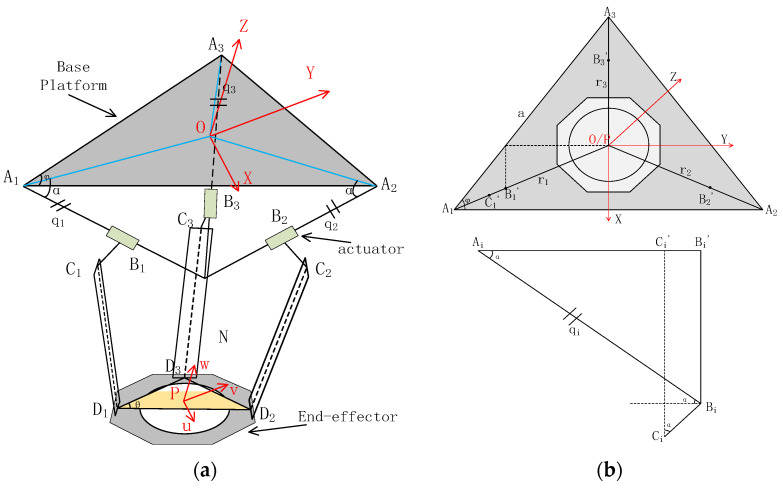
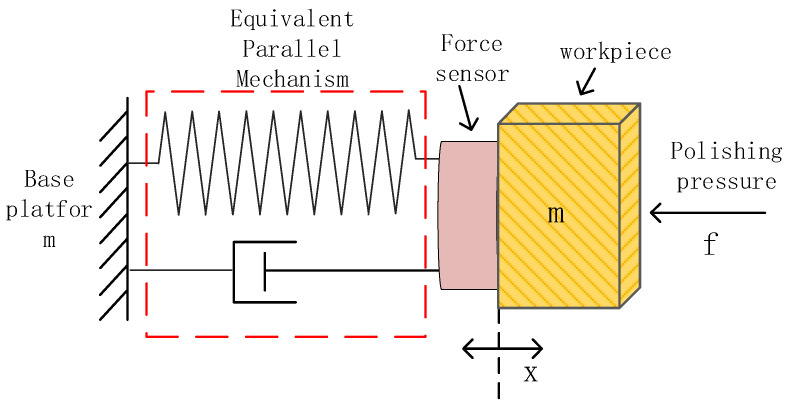
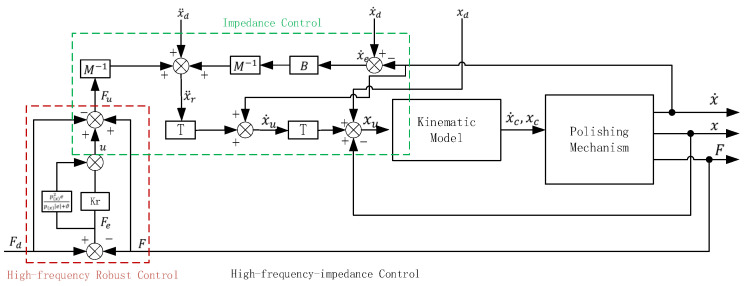
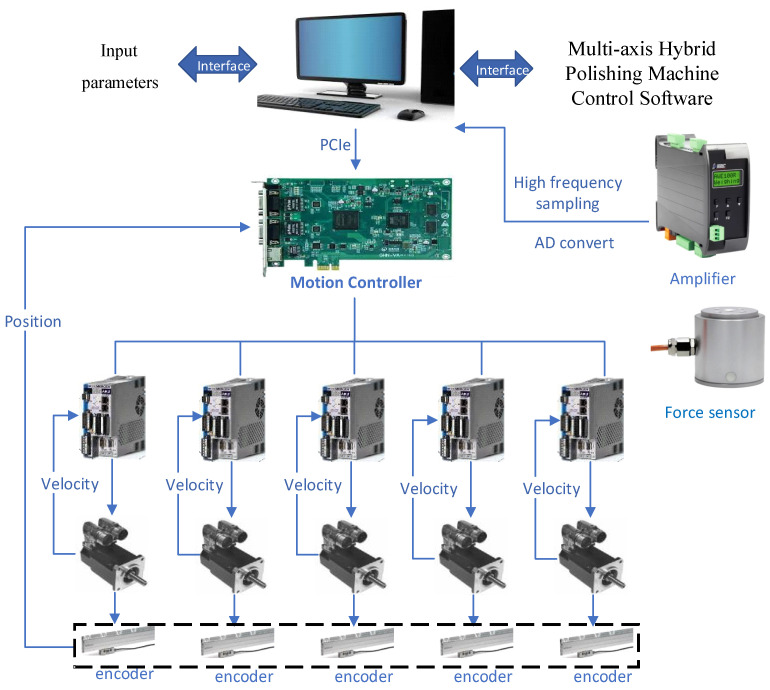
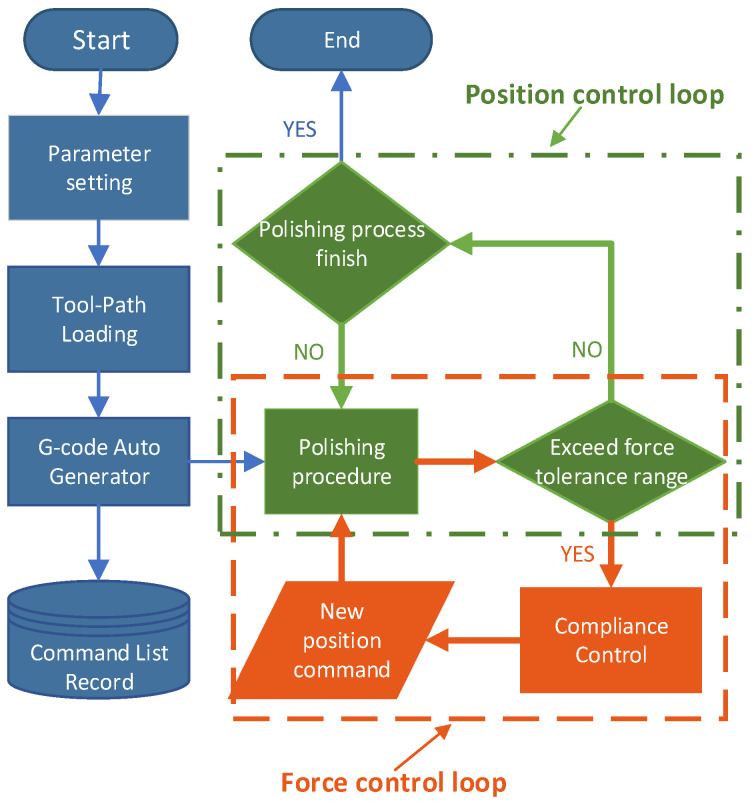
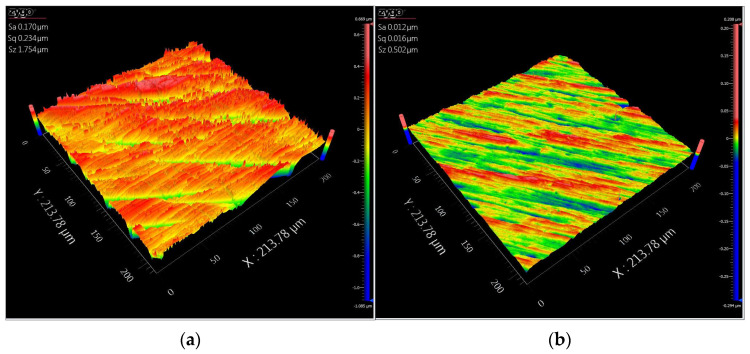
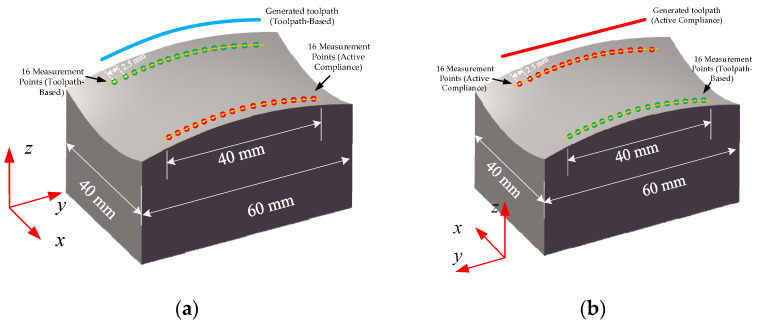
Compliance control strategies have been utilised for the ultraprecision polishing process for many years. Most researchers execute active compliance control strategies by employing impedance control law on a robot development platform. However, these methods are limited by the load capacity, positioning accuracy, and repeatability of polishing mechanisms. Moreover, a sophisticated actuator mounted at the end of the end-effector of robots is difficult to maintain in the polishing scenario. In contrast, a hybrid mechanism for polishing that possesses the advantages of serial and parallel mechanisms can mitigate the above problems, especially when an active compliance control strategy is employed. In this research, a high-frequency-impedance robust force control strategy is proposed. It outputs a position adjustment value directly according to a contact pressure adjustment value. An open architecture control system with customised software is developed to respond to external interrupts during the polishing procedure, implementing the active compliance control strategy on a hybrid mechanism. Through this method, the hybrid mechanism can adapt to the external environment with a given contact pressure automatically instead of relying on estimating the environment stiffness. Experimental results show that the proposed strategy adapts the unknown freeform surface without overshooting and improves the surface quality. The average surface roughness value decreases from 0.057 um to 0.027 um.
多年来,柔顺控制策略已被应用于超精密抛光过程。大多数研究人员在机器人开发平台上通过采用阻抗控制律来执行主动柔顺控制策略。然而,这些方法受到抛光机构的负载能力、定位精度和重复性的限制。此外,安装在机器人末端执行器端部的精密致动器在抛光场景中难以维护。相比之下,一种兼具串联和并联机构优点的混合抛光机构可以缓解上述问题,尤其是在采用主动柔顺控制策略时。在本研究中,提出了一种高频阻抗鲁棒力控制策略。它根据接触压力调整值直接输出位置调整值。开发了一个具有定制软件的开放式架构控制系统,以在抛光过程中响应外部中断,在混合机构上实现主动柔顺控制策略。通过这种方法,混合机构可以在给定接触压力下自动适应外部环境,而不是依赖于估计环境刚度。实验结果表明,所提出的策略能够适应未知的自由曲面且无超调,并提高了表面质量。平均表面粗糙度值从0.057微米降至0.027微米。