Abu-Dakka Fares J, Saveriano Matteo
Intelligent Robotics Group, Department of Electrical Engineering and Automation (EEA), Aalto University, Espoo, Finland.
Intelligent and Interactive Systems, Department of Computer Science and Digital Science Center (DiSC), University of Innsbruck, Innsbruck, Austria.
Front Robot AI. 2020 Dec 21;7:590681. doi: 10.3389/frobt.2020.590681. eCollection 2020.
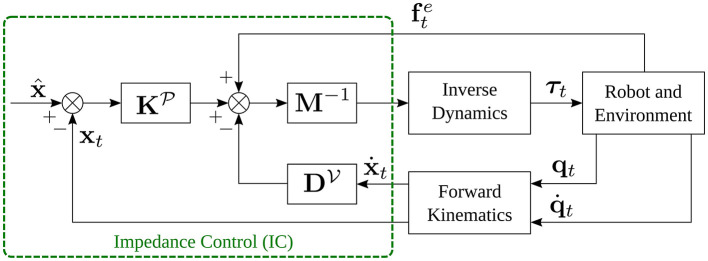
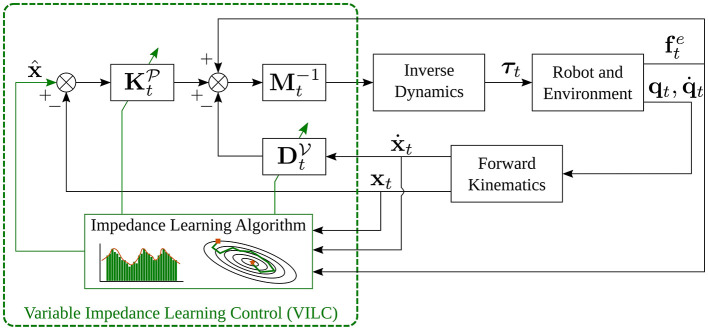
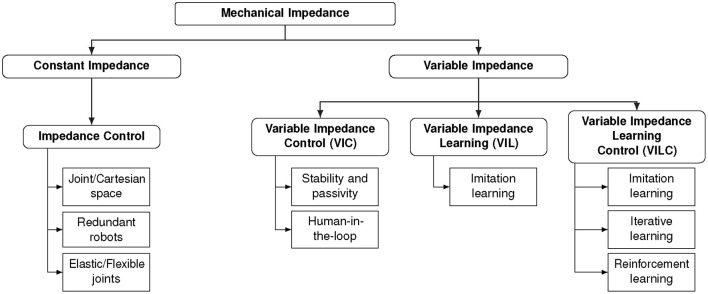
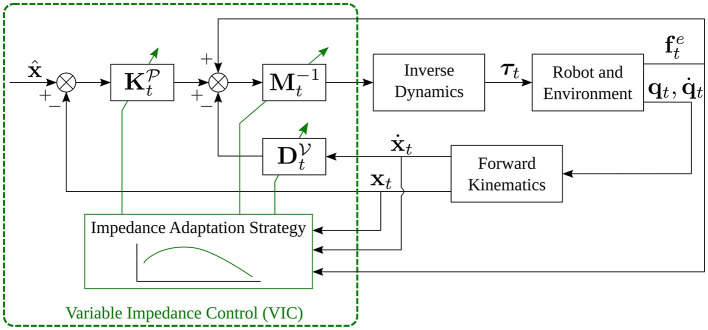
Robots that physically interact with their surroundings, in order to accomplish some tasks or assist humans in their activities, require to exploit contact forces in a safe and proficient manner. Impedance control is considered as a prominent approach in robotics to avoid large impact forces while operating in unstructured environments. In such environments, the conditions under which the interaction occurs may significantly vary during the task execution. This demands robots to be endowed with online adaptation capabilities to cope with sudden and unexpected changes in the environment. In this context, variable impedance control arises as a powerful tool to modulate the robot's behavior in response to variations in its surroundings. In this survey, we present the state-of-the-art of approaches devoted to variable impedance control from control and learning perspectives (separately and jointly). Moreover, we propose a new taxonomy for mechanical impedance based on variability, learning, and control. The objective of this survey is to put together the concepts and efforts that have been done so far in this field, and to describe advantages and disadvantages of each approach. The survey concludes with open issues in the field and an envisioned framework that may potentially solve them.
为了完成某些任务或协助人类活动而与周围环境进行物理交互的机器人,需要以安全且熟练的方式利用接触力。阻抗控制被认为是机器人技术中一种重要的方法,用于在非结构化环境中操作时避免产生较大的冲击力。在这样的环境中,交互发生的条件在任务执行过程中可能会有显著变化。这就要求机器人具备在线适应能力,以应对环境中突然出现的意外变化。在此背景下,可变阻抗控制作为一种强大的工具应运而生,可根据机器人周围环境的变化来调节其行为。在本次综述中,我们从控制和学习的角度(分别以及联合)介绍了致力于可变阻抗控制的方法的最新进展。此外,我们基于可变性、学习和控制提出了一种新的机械阻抗分类法。本次综述的目的是汇总该领域目前已完成的概念和工作,并描述每种方法的优缺点。综述最后列出了该领域的开放问题以及一个可能潜在解决这些问题的设想框架。