Chen Xueping, Fan Ke, Lu Jun, Zhang Sheng, Dong Jianhua, Qin Jisheng, Fan Weihua, Wang Yan, Zhang Yiyuan, Peng Huo, Zhang Zhizhong, Sun Zhiyong, Yu Chunlai, Xiong Yucui, Song Yan, Ye Qingqing, Mai Shiwen, Wang Yuanhua, Wang Qizheng, Zhang Fengxiang, Wen Xiaohui, Zhou Tiancheng, Han Li, Long Mian, Pan Guangjin, Burke Julian F, Zhang Xiao
Guangzhou Institutes of Biomedicine and Health, Chinese Academy of Sciences, Guangzhou 510530, People's Republic of China.
School of Light Industry and Engineering, South China University of Technology, Guangzhou 510641, People's Republic of China.
Research (Wash D C). 2024 Mar 7;7:0338. doi: 10.34133/research.0338. eCollection 2024.
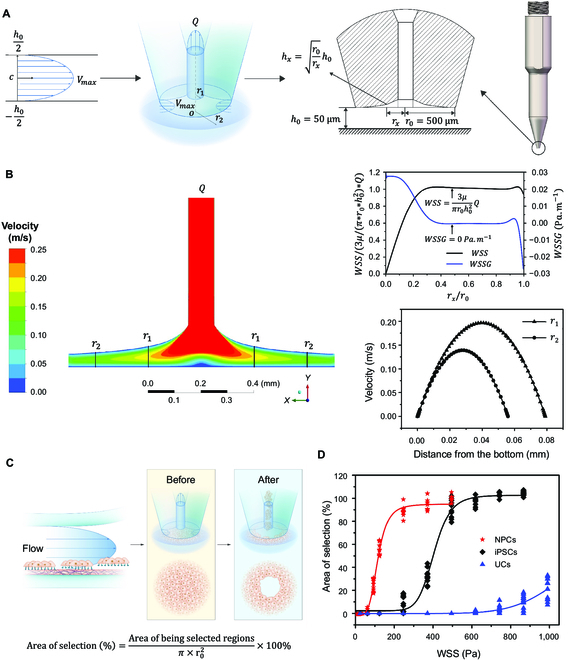
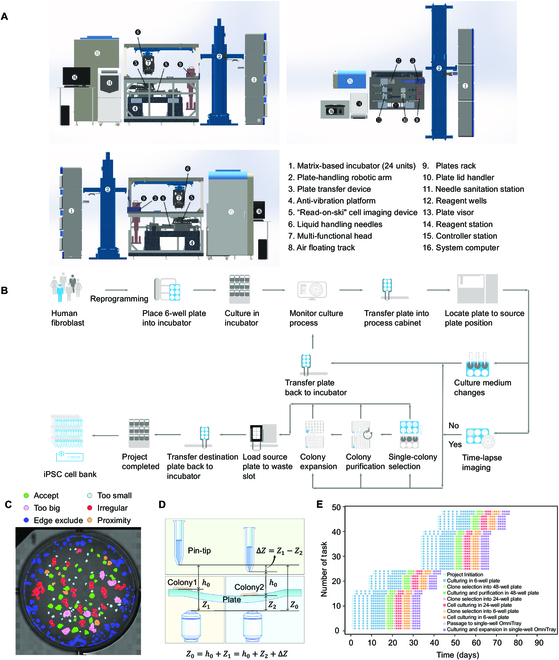
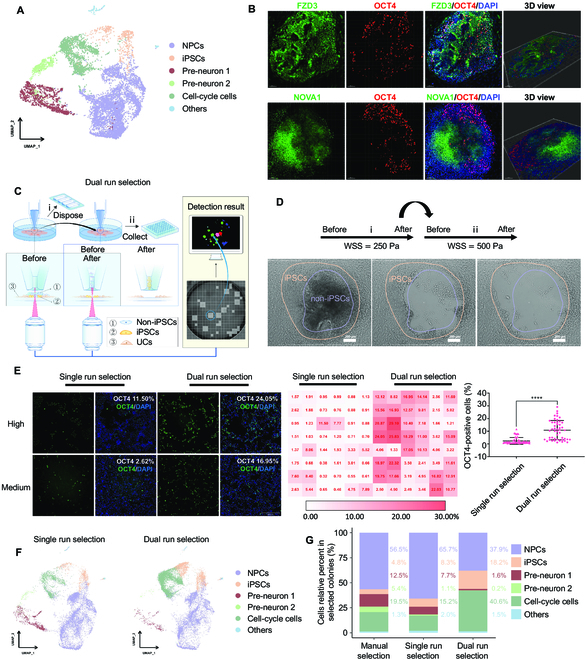
Somatic cell reprogramming generates induced pluripotent stem cells (iPSCs), which serve as a crucial source of seed cells for personalized disease modeling and treatment in regenerative medicine. However, the process of reprogramming often causes substantial lineage manipulations, thereby increasing cellular heterogeneity. As a consequence, the process of harvesting monoclonal iPSCs is labor-intensive and leads to decreased reproducibility. Here, we report the first in-house developed robotic platform that uses a pin-tip-based micro-structure to manipulate radial shear flow for automated monoclonal iPSC colony selection (~1 s) in a non-invasive and label-free manner, which includes tasks for somatic cell reprogramming culturing, medium changes; time-lapse-based high-content imaging; and iPSCs monoclonal colony detection, selection, and expansion. Throughput-wise, this automated robotic system can perform approximately 24 somatic cell reprogramming tasks within 50 days in parallel via a scheduling program. Moreover, thanks to a dual flow-based iPSC selection process, the purity of iPSCs was enhanced, while simultaneously eliminating the need for single-cell subcloning. These iPSCs generated via the dual processing robotic approach demonstrated a purity 3.7 times greater than that of the conventional manual methods. In addition, the automatically produced human iPSCs exhibited typical pluripotent transcriptional profiles, differentiation potential, and karyotypes. In conclusion, this robotic method could offer a promising solution for the automated isolation or purification of lineage-specific cells derived from iPSCs, thereby accelerating the development of personalized medicines.
体细胞重编程可产生诱导多能干细胞(iPSC),它是再生医学中用于个性化疾病建模和治疗的关键种子细胞来源。然而,重编程过程常常会导致大量的谱系操作,从而增加细胞异质性。因此,收获单克隆iPSC的过程劳动强度大且重复性降低。在此,我们报告首个内部开发的机器人平台,该平台使用基于针尖的微结构来操纵径向剪切流,以非侵入性和无标记的方式自动选择单克隆iPSC集落(约1秒),这包括体细胞重编程培养、更换培养基、基于延时的高内涵成像以及iPSC单克隆集落检测、选择和扩增等任务。在通量方面,这个自动化机器人系统可以通过调度程序在50天内并行执行约24个体细胞重编程任务。此外,得益于基于双流的iPSC选择过程,iPSC的纯度得到提高,同时无需进行单细胞亚克隆。通过这种双流程机器人方法产生的iPSC纯度比传统手动方法高3.7倍。此外,自动生成的人类iPSC表现出典型的多能转录谱、分化潜能和核型。总之,这种机器人方法可为自动分离或纯化源自iPSC的谱系特异性细胞提供一个有前景的解决方案,从而加速个性化药物的开发。