Zhou Xiaorui, Chen Guancong, Jin Binjie, Feng Haijun, Chen Zike, Fang Mengqi, Yang Bo, Xiao Rui, Xie Tao, Zheng Ning
State Key Laboratory of Chemical Engineering, College of Chemical and Biological Engineering, Zhejiang University, Hangzhou, 310027, China.
State Key Laboratory of Fluid Power and Mechatronic Systems, Key Laboratory of Soft Machines and Smart Devices of Zhejiang Province, Department of Engineering Mechanics, Zhejiang University, Hangzhou, 310027, China.
Adv Sci (Weinh). 2024 Jun;11(23):e2402358. doi: 10.1002/advs.202402358. Epub 2024 Mar 23.
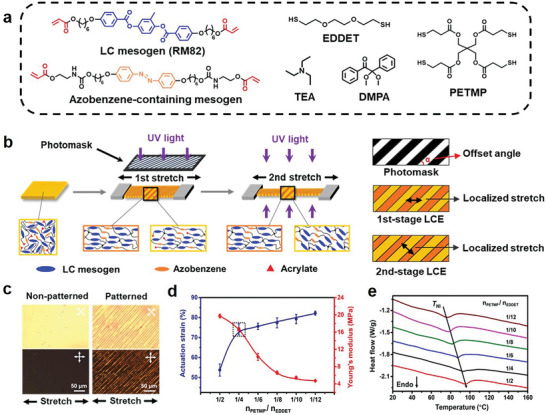
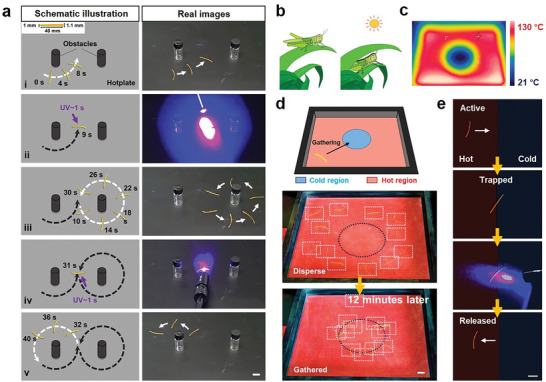
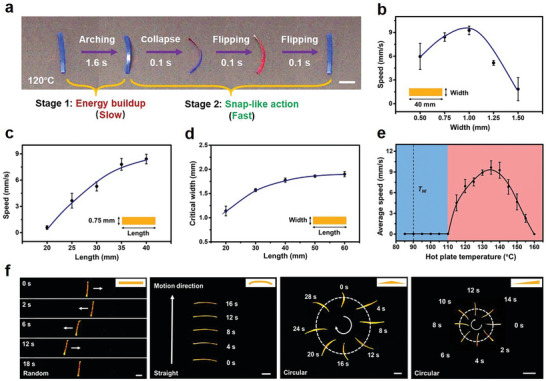
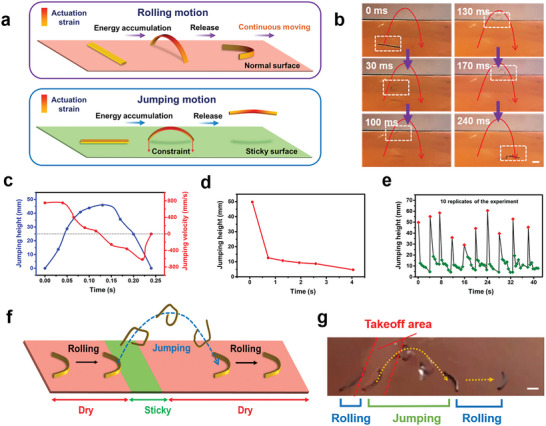
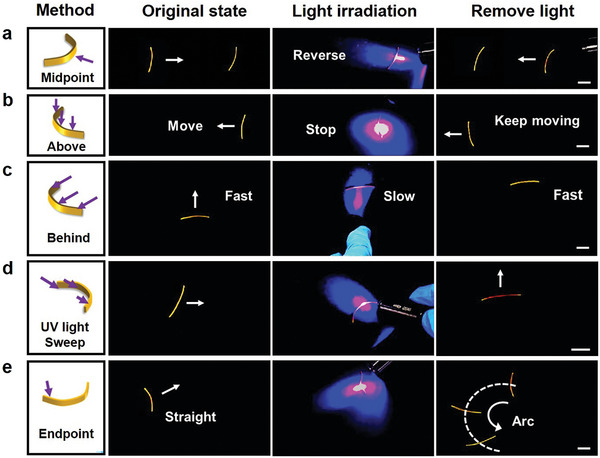
Self-oscillation phenomena observed in nature serve as extraordinary inspiration for designing synthetic autonomous moving systems. Converting self-oscillation into designable self-sustained locomotion can lead to a new generation of soft robots that require minimal/no external control. However, such locomotion is typically constrained to a single mode dictated by the constant surrounding environment. In this study, a liquid crystal elastomer (LCE) robot capable of achieving self-sustained multimodal locomotion, with the specific motion mode being controlled via substrate adhesion or remote light stimulation is presented. Specifically, the LCE is mechanically trained to undergo repeated snapping actions to ensure its self-sustained rolling motion in a constant gradient thermal field atop a hotplate. By further fine-tuning the substrate adhesion, the LCE robot exhibits reversible transitions between rolling and jumping modes. In addition, the rolling motion can be manipulated in real time through light stimulation to perform other diverse motions including turning, decelerating, stopping, backing up, and steering around complex obstacles. The principle of introducing an on-demand gate control offers a new venue for designing future autonomous soft robots.
自然界中观察到的自振荡现象为设计合成自主移动系统提供了非凡的灵感。将自振荡转化为可设计的自持运动可以催生新一代几乎不需要/无需外部控制的软机器人。然而,这种运动通常受限于由恒定周围环境决定的单一模式。在本研究中,展示了一种能够实现自持多模态运动的液晶弹性体(LCE)机器人,其特定运动模式可通过基底粘附或远程光刺激来控制。具体而言,对LCE进行机械训练,使其进行重复的突然动作,以确保其在热板上的恒定梯度热场中进行自持滚动运动。通过进一步微调基底粘附,LCE机器人在滚动和跳跃模式之间呈现可逆转变。此外,滚动运动可通过光刺激实时操控,以执行其他各种运动,包括转弯、减速、停止、后退以及绕过复杂障碍物转向。引入按需门控的原理为设计未来的自主软机器人提供了新途径。