Department of Energy and Mechanics Sciences, Universidad de las Fuerzas Armadas, Sangolqui 171103, Ecuador.
Department of Electrical, Electronics and Telecommunications Engineering, Universidad de las Fuerzas Armadas, Sangolqui 171103, Ecuador.
Sensors (Basel). 2024 Mar 17;24(6):1922. doi: 10.3390/s24061922.
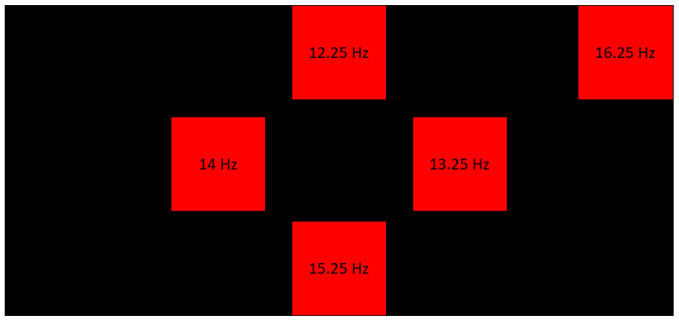
This paper explores the potential benefits of integrating a brain-computer interface (BCI) utilizing the visual-evoked potential paradigm (SSVEP) with a six-degrees-of-freedom (6-DOF) robotic arm to enhance rehabilitation tools. The SSVEP-BCI employs electroencephalography (EEG) as a method of measuring neural responses inside the occipital lobe in reaction to pre-established visual stimulus frequencies. The BCI offline and online studies yielded accuracy rates of 75% and 83%, respectively, indicating the efficacy of the system in accurately detecting and capturing user intent. The robotic arm achieves planar motion by utilizing a total of five control frequencies. The results of this experiment exhibited a high level of precision and consistency, as indicated by the recorded values of ±0.85 and ±1.49 cm for accuracy and repeatability, respectively. Moreover, during the performance tests conducted with the task of constructing a square within each plane, the system demonstrated accuracy of 79% and 83%. The use of SSVEP-BCI and a robotic arm together shows promise and sets a solid foundation for the development of assistive technologies that aim to improve the health of people with amyotrophic lateral sclerosis, spina bifida, and other related diseases.
本文探讨了将利用视觉诱发电位范式(SSVEP)的脑机接口(BCI)与六自由度(6-DOF)机械臂集成,以增强康复工具的潜在益处。SSVEP-BCI 使用脑电图(EEG)作为一种测量枕叶中神经反应的方法,以应对预先建立的视觉刺激频率。BCI 的离线和在线研究分别产生了 75%和 83%的准确率,表明该系统在准确检测和捕捉用户意图方面的有效性。机械臂通过使用总共五个控制频率来实现平面运动。实验结果表现出高精度和一致性,准确性和重复性的记录值分别为±0.85 和±1.49 cm。此外,在每个平面内构建正方形的任务性能测试中,系统的准确率达到了 79%和 83%。SSVEP-BCI 和机械臂的结合使用显示出了很大的潜力,为开发旨在改善肌萎缩侧索硬化症、脊柱裂和其他相关疾病患者健康的辅助技术奠定了坚实的基础。