Instituto de Automática e Informática Industrial, Universitat Politècnica de València, 46022 Valencia, Spain.
Facultad de Ingeniería, Ingeniería Mecatrónica, Universidad Autónoma de Bucaramanga, Bucaramanga 680003, Colombia.
Sensors (Basel). 2022 Jul 2;22(13):5000. doi: 10.3390/s22135000.
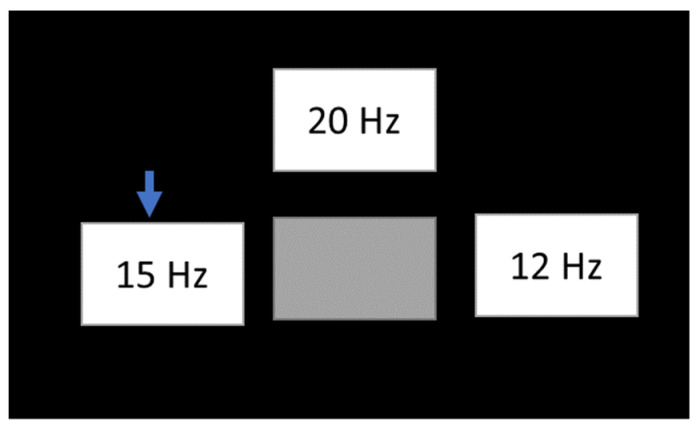
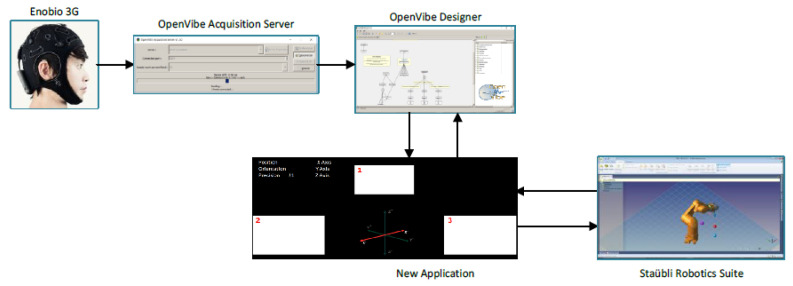
Robotics has been successfully applied in the design of collaborative robots for assistance to people with motor disabilities. However, man-machine interaction is difficult for those who suffer severe motor disabilities. The aim of this study was to test the feasibility of a low-cost robotic arm control system with an EEG-based brain-computer interface (BCI). The BCI system relays on the Steady State Visually Evoked Potentials (SSVEP) paradigm. A cross-platform application was obtained in C++. This C++ platform, together with the open-source software Openvibe was used to control a Stäubli robot arm model TX60. Communication between Openvibe and the robot was carried out through the Virtual Reality Peripheral Network (VRPN) protocol. EEG signals were acquired with the 8-channel Enobio amplifier from Neuroelectrics. For the processing of the EEG signals, Common Spatial Pattern (CSP) filters and a Linear Discriminant Analysis classifier (LDA) were used. Five healthy subjects tried the BCI. This work allowed the communication and integration of a well-known BCI development platform such as Openvibe with the specific control software of a robot arm such as Stäubli TX60 using the VRPN protocol. It can be concluded from this study that it is possible to control the robotic arm with an SSVEP-based BCI with a reduced number of dry electrodes to facilitate the use of the system.
机器人技术已成功应用于协作机器人的设计,以帮助运动障碍者。然而,对于那些患有严重运动障碍的人来说,人机交互是困难的。本研究旨在测试基于脑电图的脑机接口(BCI)的低成本机械臂控制系统的可行性。BCI 系统依赖于稳态视觉诱发电位(SSVEP)范式。使用 C++获得了一个跨平台应用程序。该 C++平台与开源软件 Openvibe 一起用于控制 Stäubli 机器人臂模型 TX60。Openvibe 和机器人之间的通信是通过虚拟现实外围网络(VRPN)协议进行的。EEG 信号是使用 Neuroelectrics 的 8 通道 Enobio 放大器采集的。为了处理 EEG 信号,使用了公共空间模式(CSP)滤波器和线性判别分析分类器(LDA)。五名健康受试者尝试了 BCI。这项工作允许使用 VRPN 协议将知名的 BCI 开发平台(如 Openvibe)与机器人臂的特定控制软件(如 Stäubli TX60)进行通信和集成。可以得出结论,使用较少的干电极,基于 SSVEP 的 BCI 可以控制机械臂,从而方便系统的使用。