Instituto de Biomecánica-IBV, Universitat Politècnica de València, Edifici 9C, Camí de Vera s/n, 46022 Valencia, Spain.
Instituto Universitario de Automática e Informática Industrial, Universitat Politècnica de València, Edifici 1F, Camí de Vera, s/n, 46022 Valencia, Spain.
Sensors (Basel). 2024 Mar 17;24(6):1923. doi: 10.3390/s24061923.
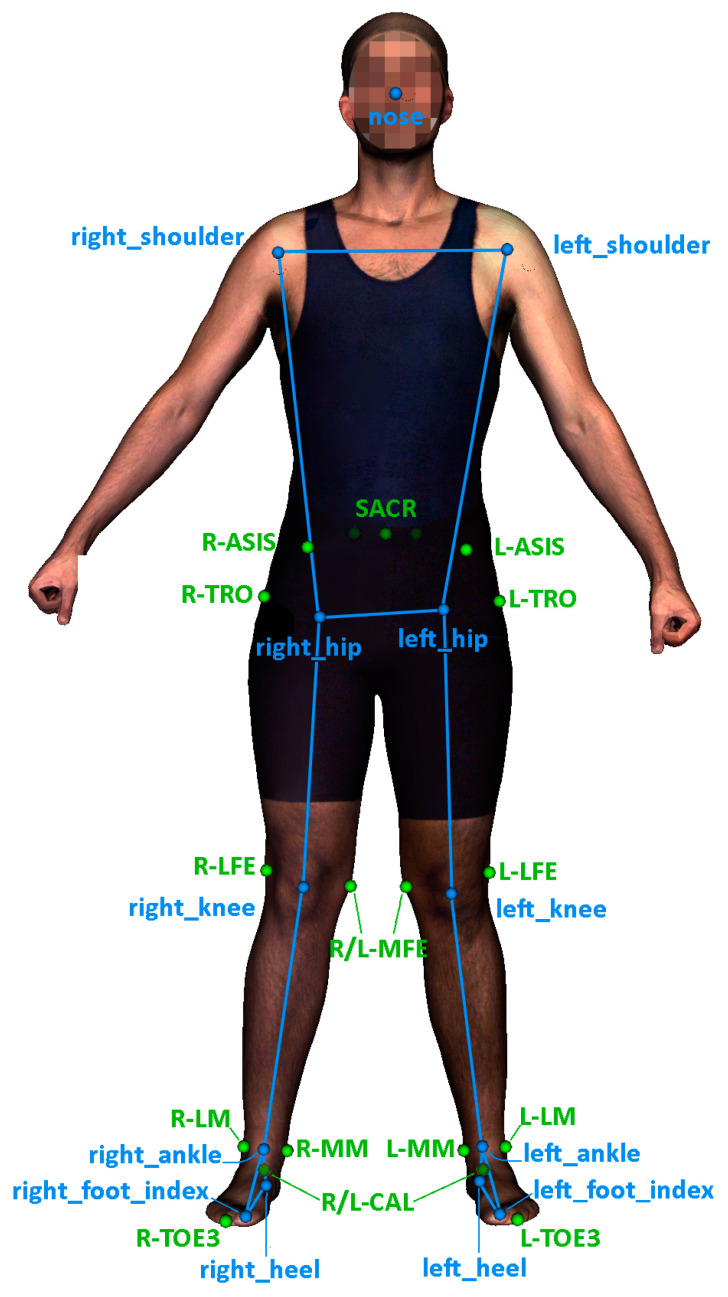
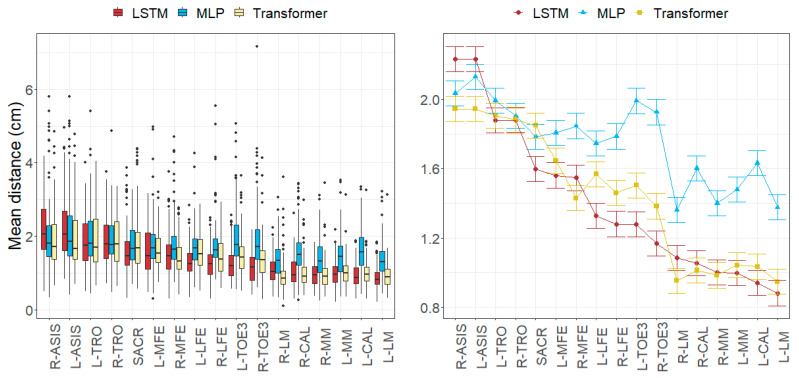
In biomechanics, movement is typically recorded by tracking the trajectories of anatomical landmarks previously marked using passive instrumentation, which entails several inconveniences. To overcome these disadvantages, researchers are exploring different markerless methods, such as pose estimation networks, to capture movement with equivalent accuracy to marker-based photogrammetry. However, pose estimation models usually only provide joint centers, which are incomplete data for calculating joint angles in all anatomical axes. Recently, marker augmentation models based on deep learning have emerged. These models transform pose estimation data into complete anatomical data. Building on this concept, this study presents three marker augmentation models of varying complexity that were compared to a photogrammetry system. The errors in anatomical landmark positions and the derived joint angles were calculated, and a statistical analysis of the errors was performed to identify the factors that most influence their magnitude. The proposed Transformer model improved upon the errors reported in the literature, yielding position errors of less than 1.5 cm for anatomical landmarks and 4.4 degrees for all seven movements evaluated. Anthropometric data did not influence the errors, while anatomical landmarks and movement influenced position errors, and model, rotation axis, and movement influenced joint angle errors.
在生物力学中,运动通常通过跟踪先前使用被动仪器标记的解剖学标志点的轨迹来记录,这涉及到一些不便之处。为了克服这些缺点,研究人员正在探索不同的无标记方法,例如姿势估计网络,以与基于标记的摄影测量术相当的精度捕捉运动。然而,姿势估计模型通常仅提供关节中心,这对于在所有解剖轴上计算关节角度来说是不完整的数据。最近,基于深度学习的标记增强模型已经出现。这些模型将姿势估计数据转换为完整的解剖学数据。基于这一概念,本研究提出了三种不同复杂程度的标记增强模型,并与摄影测量系统进行了比较。计算了解剖学标志点位置和推导的关节角度的误差,并对误差进行了统计分析,以确定对其大小影响最大的因素。所提出的 Transformer 模型改进了文献中报告的误差,使得解剖学标志点的位置误差小于 1.5 厘米,所有评估的七个运动的关节角度误差小于 4.4 度。人体测量数据对误差没有影响,而解剖学标志点和运动影响位置误差,模型、旋转轴和运动影响关节角度误差。