Department of Cariology and Endodontology, Peking University School and Hospital of Stomatology & National Center for Stomatology & National Clinical Research Center for Oral Diseases & National Engineering Research Center of Oral Biomaterials and Digital Medical Devices, Beijing, PR China.
Fourth Clinical Division, Peking University School and Hospital of Stomatology & National Center for Stomatology & National Clinical Research Center for Oral Diseases & National Engineering Research Center of Oral Biomaterials and Digital Medical Devices, Beijing, PR China.
BMC Oral Health. 2024 May 19;24(1):582. doi: 10.1186/s12903-024-04306-6.
The operation accuracy and efficiency of dynamic navigated endodontic surgery were evaluated through in vitro experiments. This study provides a reference for future clinical application of dynamic navigation systems in endodontic surgery.
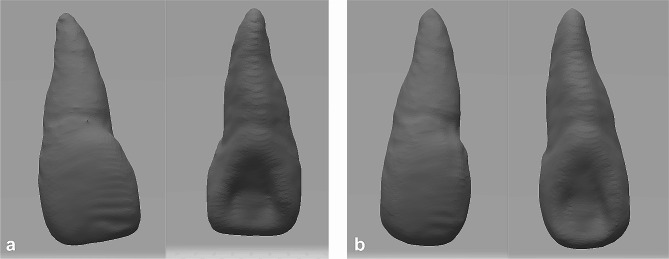
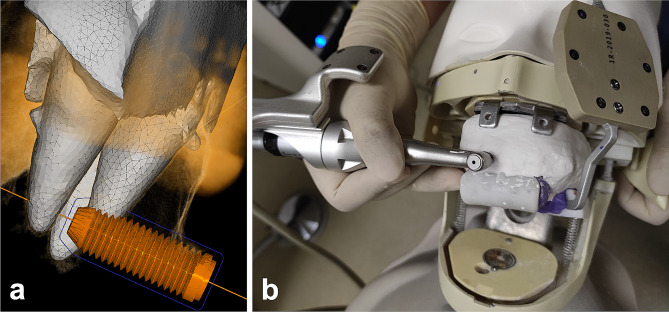
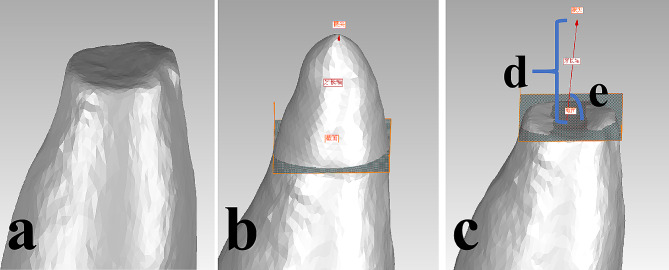
3D-printed maxillary anterior teeth were used in the preparation of models for endodontic surgery. Endodontic surgery was performed with and without dynamic navigation by an operator who was proficient in dynamic navigation technology but had no experience in endodontic surgery. Optical scanning data were applied to evaluate the length and angle deviations of root-end resection. And the operation time was recorded. T tests were used to analyze the effect of dynamic navigation technology on the accuracy and duration of endodontic surgery.
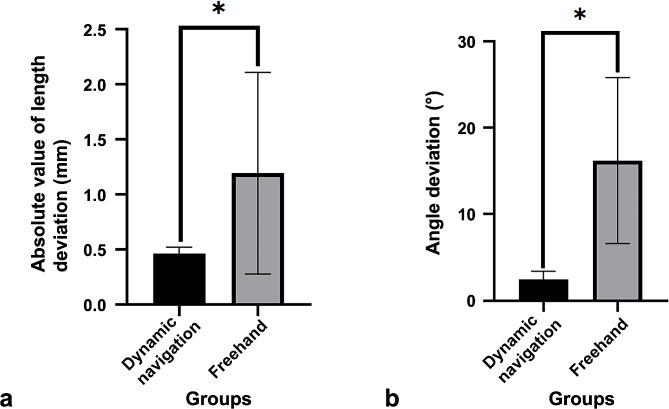
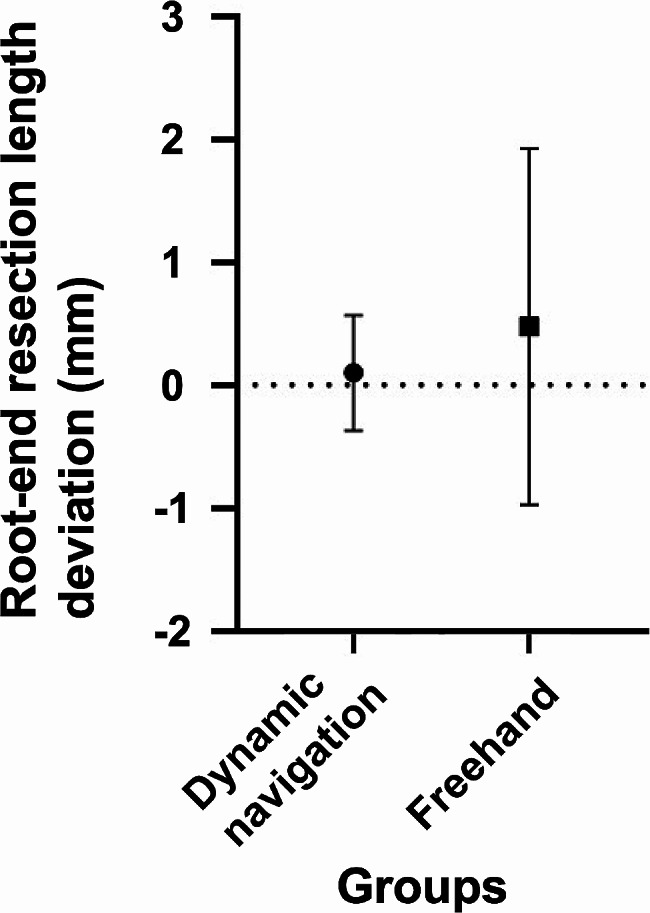
With dynamic navigation, the root-end resection length deviation was 0.46 ± 0.06 mm, the angle deviation was 2.45 ± 0.96°, and the operation time was 187 ± 22.97 s. Without dynamic navigation, the root-end resection length deviation was 1.20 ± 0.92 mm, the angle deviation was 16.20 ± 9.59°, and the operation time was 247 ± 61.47 s. Less deviation was achieved and less operation time was spent with than without dynamic navigation (P < 0.01).
The application of a dynamic navigation system in endodontic surgery can improve the accuracy and efficiency significantly for operators without surgical experience and reduce the operation time.
通过体外实验评估了动态导航根管手术的操作精度和效率。本研究为未来动态导航系统在根管手术中的临床应用提供了参考。
使用 3D 打印的上颌前牙制备根管手术模型。由一位精通动态导航技术但没有根管手术经验的操作人员在有和没有动态导航的情况下进行根管手术。光学扫描数据用于评估根尖切除的长度和角度偏差。并记录手术时间。使用 t 检验分析动态导航技术对根管手术准确性和手术时间的影响。
使用动态导航时,根尖切除长度偏差为 0.46 ± 0.06 mm,角度偏差为 2.45 ± 0.96°,手术时间为 187 ± 22.97 s。不使用动态导航时,根尖切除长度偏差为 1.20 ± 0.92 mm,角度偏差为 16.20 ± 9.59°,手术时间为 247 ± 61.47 s。与不使用动态导航相比,使用动态导航时偏差更小,手术时间更短(P < 0.01)。
在没有手术经验的操作人员中,应用动态导航系统可显著提高根管手术的准确性和效率,减少手术时间。