Ni Peng, Sun Jianwei, Dong Jialin
School of Applied Technology Changchun University of Technology, Changchun 130012, China.
School of Electrical Engineering Changchun University of Technology, Changchun 130012, China.
Appl Bionics Biomech. 2024 Aug 29;2024:5905225. doi: 10.1155/2024/5905225. eCollection 2024.
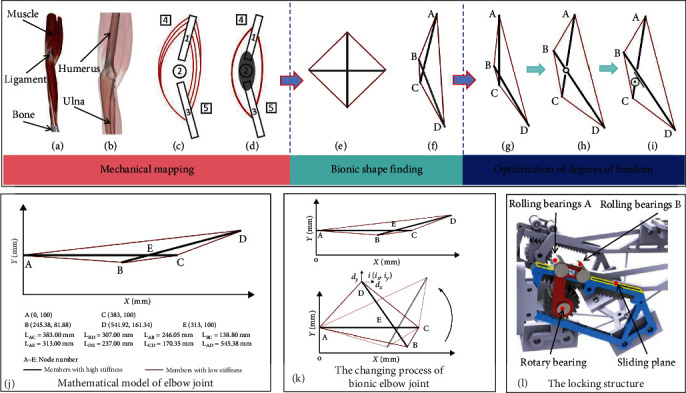
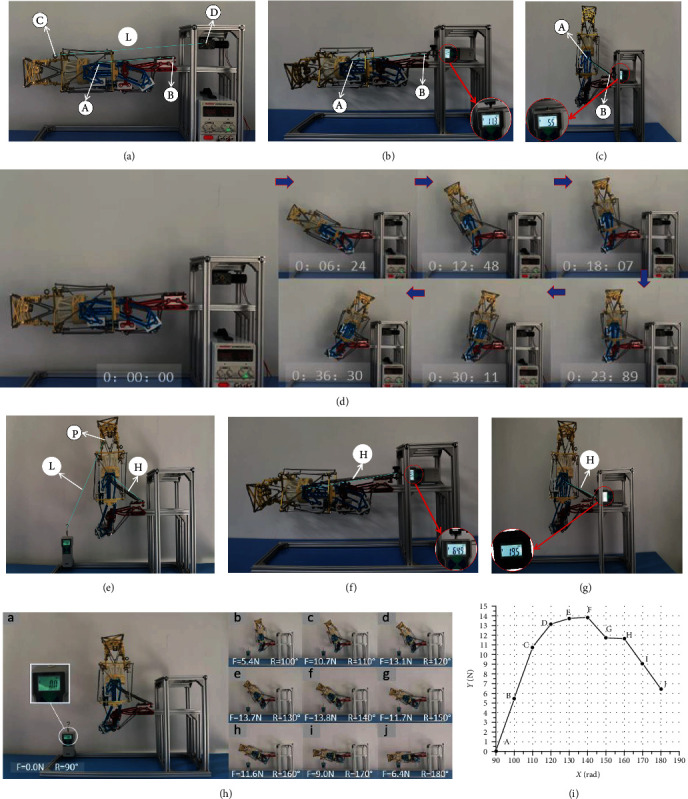
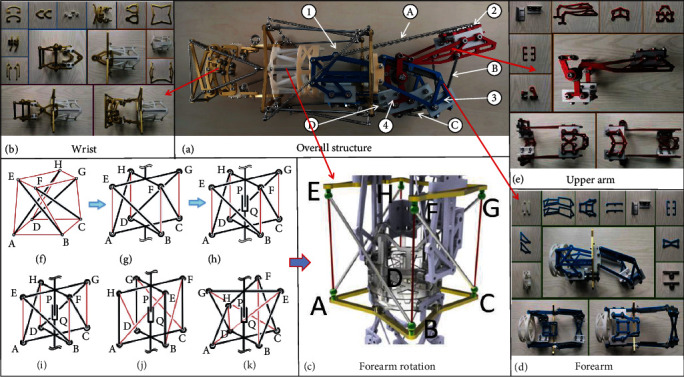
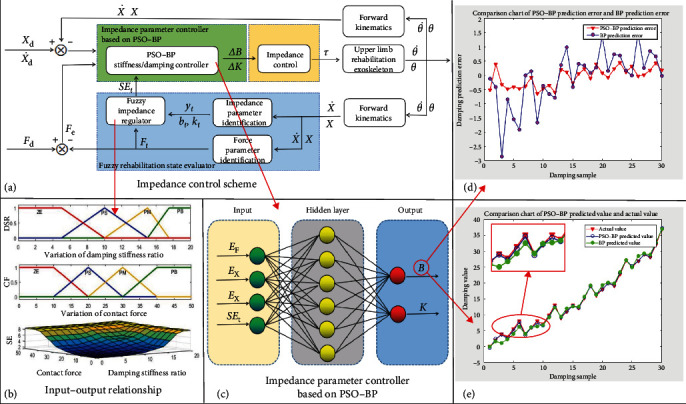
Upper limb exoskeleton rehabilitation devices can improve the quality of rehabilitation and relieve the pressure of rehabilitation medical treatment, which is a research hotspot in the field of medical robots. Aiming at the problems such as large volume, high cost, low comfort, and difficulty in promotion of traditional exoskeleton rehabilitation devices, and considering the lightweight, discontinuous, high flexibility, and high biomimetic characteristics of tensegrity structure, we designed an upper limb bionic exoskeleton rehabilitation device based on tensegrity structure. First, this article uses mapping methods to establish a mapping model for upper limb exoskeletons based on the tensegrity structure and designs the overall structure of upper limb exoskeletons based on the mapping model. Second, a bionic elbow joint device based on gear and rack was designed, and the stability of the bionic elbow joint was proved using the positive definite matrix method. This device can simulate the micro displacement between bones of the human elbow joint, improve the axial matching ability between the upper limbs and the rehabilitation device, and enhance the comfort of rehabilitation. Third, an impedance control scheme based on back propagation (BP) neural network was designed to address the low control accuracy of flexible structures and patient spasms. Finally, we designed the impedance control scheme of the PSO-BP neural network based on a fuzzy rehabilitation state evaluator. The experimental results show that the exoskeleton rehabilitation device has good flexion motion stability and assist ability and has significant advantages in volume and mobility. The control strategy proposed in this paper has high control precision and adaptive ability and has potential application value in the field of medical rehabilitation.
上肢外骨骼康复装置能够提高康复质量,缓解康复医疗压力,是医疗机器人领域的研究热点。针对传统外骨骼康复装置存在的体积大、成本高、舒适性差、推广困难等问题,考虑到张拉整体结构的轻量化、非连续、高柔性和高仿生特性,设计了一种基于张拉整体结构的上肢仿生外骨骼康复装置。首先,本文采用映射方法建立基于张拉整体结构的上肢外骨骼映射模型,并基于该映射模型设计上肢外骨骼的整体结构。其次,设计了一种基于齿轮齿条的仿生肘关节装置,采用正定矩阵法证明了仿生肘关节的稳定性。该装置能够模拟人体肘关节骨骼间的微位移,提高上肢与康复装置的轴向匹配能力,增强康复舒适性。第三,设计了一种基于反向传播(BP)神经网络的阻抗控制方案,以解决柔性结构控制精度低和患者痉挛问题。最后,基于模糊康复状态评估器设计了PSO-BP神经网络的阻抗控制方案。实验结果表明,该外骨骼康复装置具有良好的屈伸运动稳定性和辅助能力,在体积和机动性方面具有显著优势。本文提出的控制策略具有较高的控制精度和自适应能力,在医疗康复领域具有潜在的应用价值。