Collaborative Robotics and Intelligent Systems (CoRIS) Institute, Oregon State University Corvallis OR 97331 USA.
Disability and Mobility Do-it-Yourself Co-OpOregon State University Corvallis OR 97331 USA.
IEEE J Transl Eng Health Med. 2024 Aug 20;12:613-621. doi: 10.1109/JTEHM.2024.3446511. eCollection 2024.
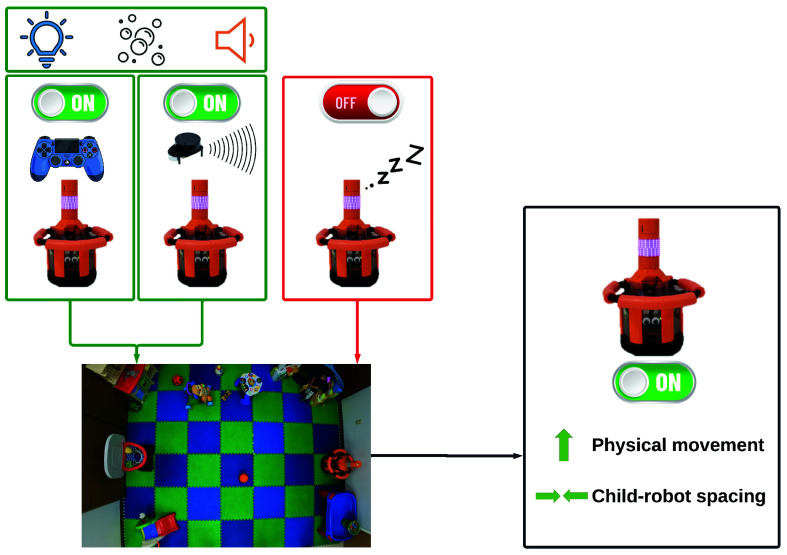
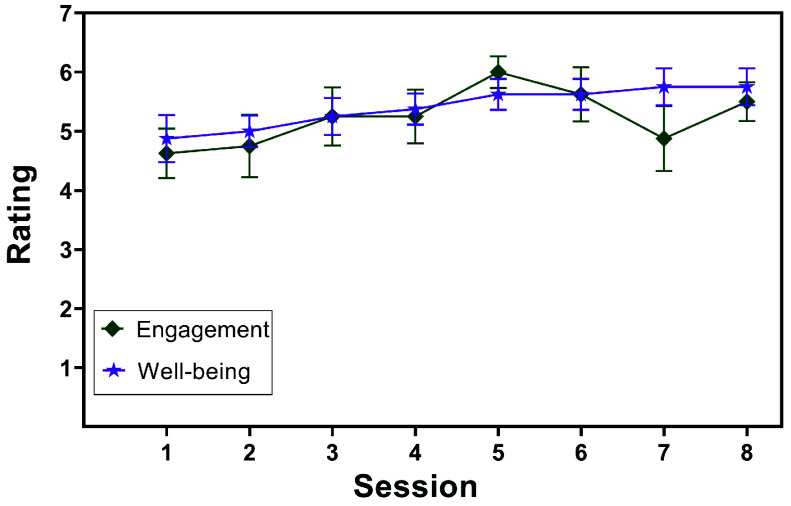
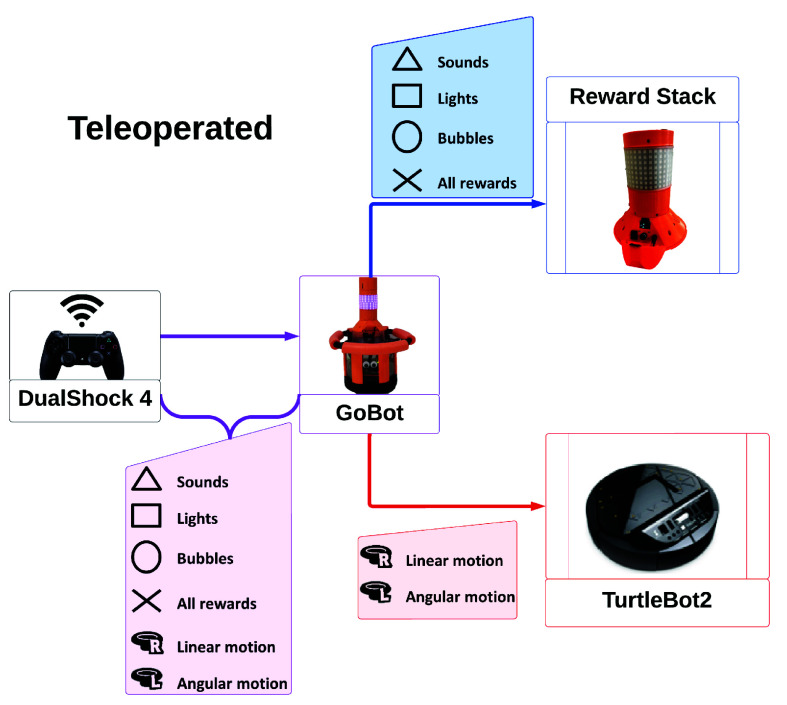
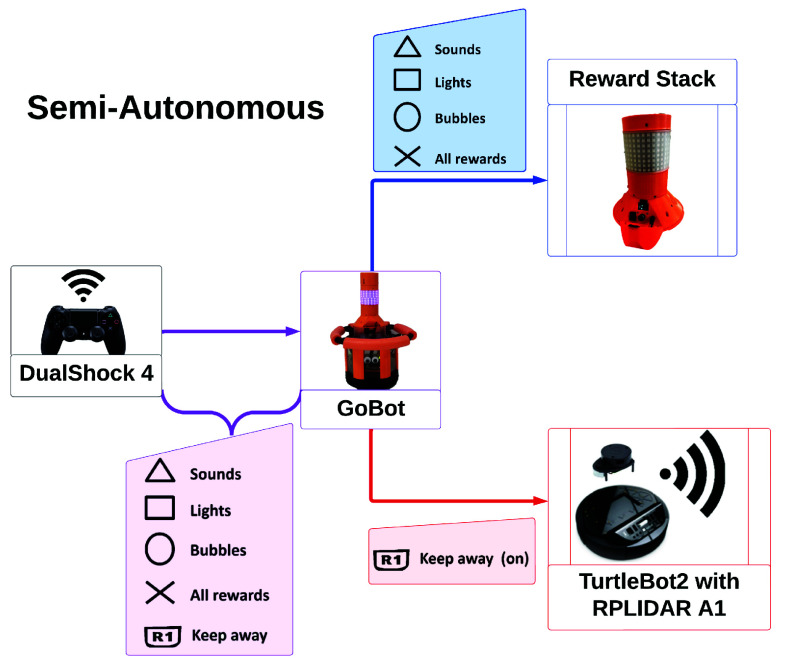
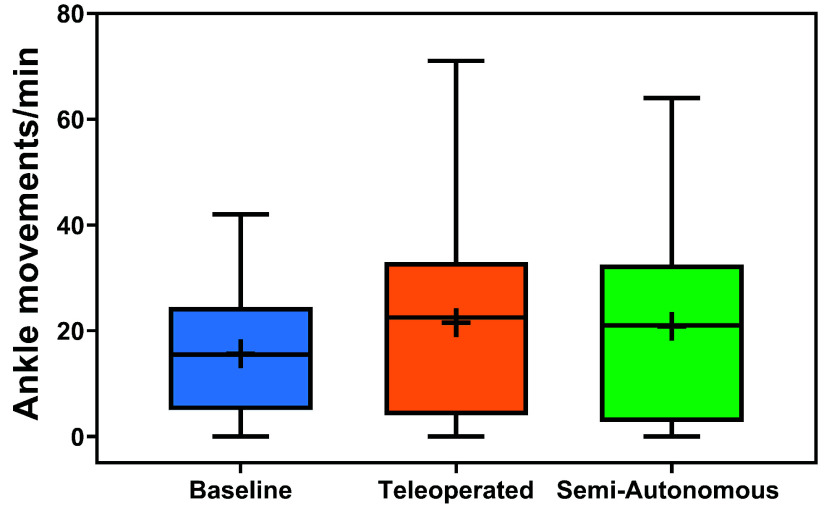
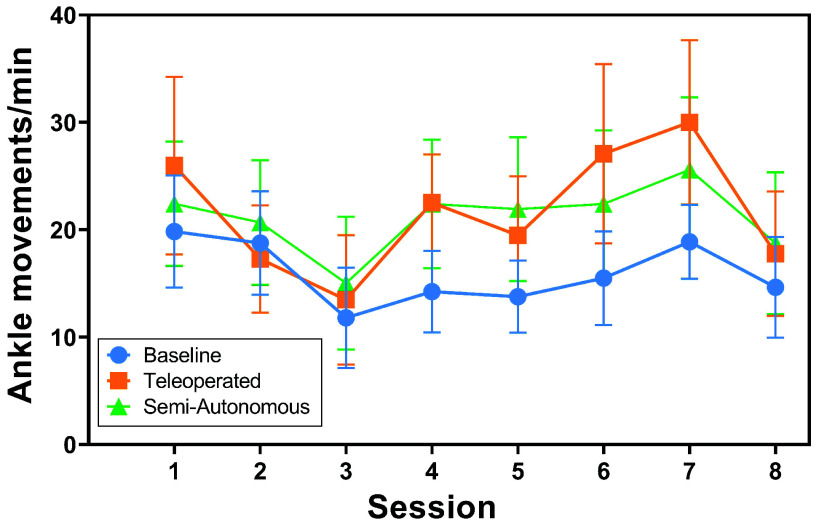
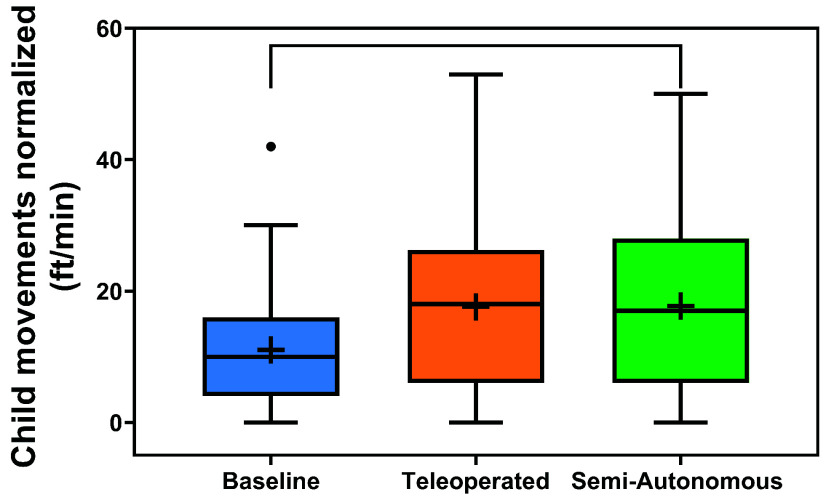
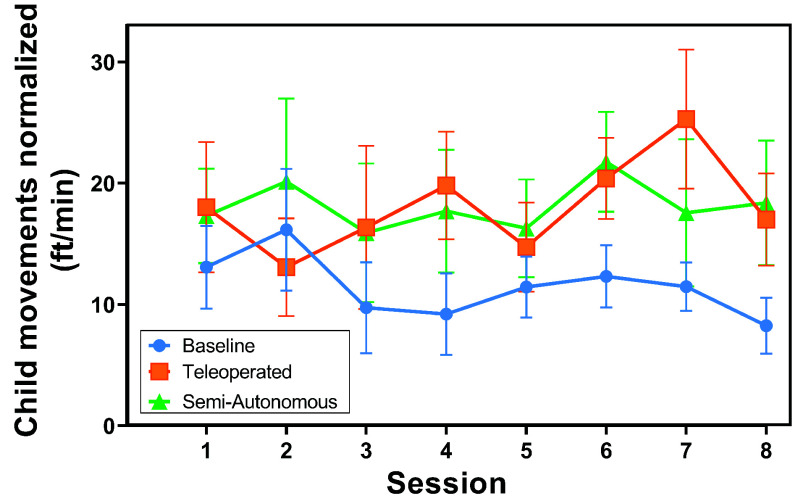
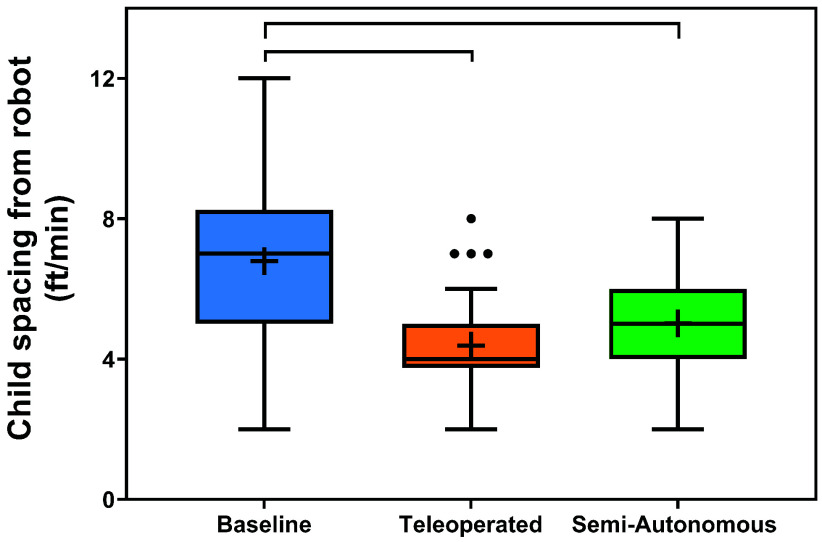
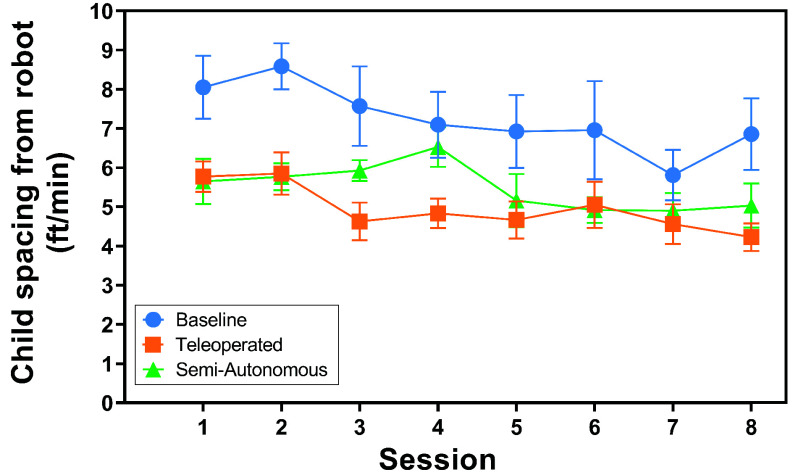
Children worldwide are becoming increasingly inactive, leading to significant wellness challenges. Initial findings from our research team indicate that robots could potentially provide a more effective approach (compared to other age-appropriate toys) for encouraging physical activity in children. However, the basis of this past work relied on either interactions with groups of children (making it challenging to isolate specific factors that influenced activity levels) or a preliminary version of results of the present study (which centered on just a single more exploratory method for assessing child movement). This paper delves into more controlled interactions involving a single robot and a child participant, while also considering observations over an extended period to mitigate the influence of novelty on the study outcomes. We discuss the outcomes of a two-month-long deployment, during which [Formula: see text] participants engaged with our custom robot, GoBot, in weekly sessions. During each session, the children experienced three different conditions: a teleoperated robot mode, a semi-autonomous robot mode, and a control condition in which the robot was present but inactive. Compared to our past related work, the results expanded our findings by confirming with greater clout (based on multiple data streams, including one more robust measure compared to the past related work) that children tended to be more physically active when the robot was active, and interestingly, there were no significant differences between the teleoperated and semi-autonomous modes in terms of our study measures. These insights can inform future applications of assistive robots in child motor interventions, including the guiding of appropriate levels of autonomy for these systems. This study demonstrates that incorporating robotic systems into play environments can boost physical activity in young children, indicating potential implementation in settings crafted to enhance children's physical movement.
全世界的儿童正变得越来越不爱活动,这导致了严重的健康挑战。我们研究团队的初步研究结果表明,机器人可能为鼓励儿童进行身体活动提供一种比其他适合年龄的玩具更有效的方法。然而,过去工作的基础要么依赖于与儿童群体的互动(这使得很难分离出影响活动水平的特定因素),要么依赖于本研究初步版本的结果(仅关注一种用于评估儿童运动的更探索性方法)。本文深入探讨了涉及单个机器人和儿童参与者的更受控的互动,同时考虑了更长时间段的观察,以减轻新颖性对研究结果的影响。我们讨论了为期两个月的部署的结果,在此期间,[Formula: see text]名参与者每周与我们的定制机器人 GoBot 进行互动。在每次会议中,孩子们体验了三种不同的条件:远程操作机器人模式、半自主机器人模式和机器人在场但不活动的对照条件。与我们过去的相关工作相比,结果通过更多的数据流(包括一种比过去的相关工作更稳健的措施)更有力地证实了我们的发现,即当机器人处于活动状态时,孩子们往往更活跃,有趣的是,在我们的研究措施方面,远程操作和半自主模式之间没有显著差异。这些见解可以为辅助机器人在儿童运动干预中的未来应用提供信息,包括为这些系统指导适当的自主权水平。这项研究表明,将机器人系统纳入游戏环境可以促进幼儿的身体活动,表明可以在为增强儿童身体运动而设计的环境中实施。