Yue Peihao, Xu Bowen, Zhang Min
College of Electrical and Information Engineering, Hunan University, Changsha, 410082, China.
Hunan Academy of Forestry, Changsha, 410012, China.
Sci Rep. 2024 Sep 13;14(1):21447. doi: 10.1038/s41598-024-72156-x.
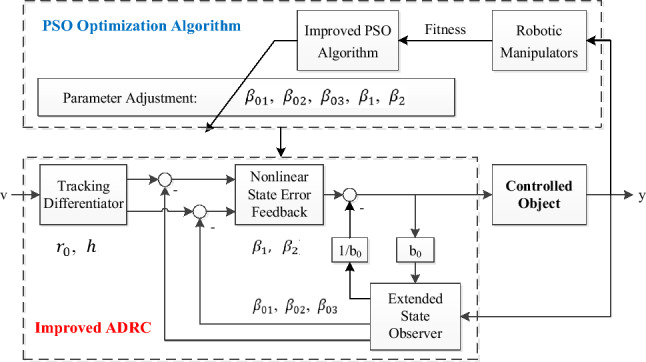
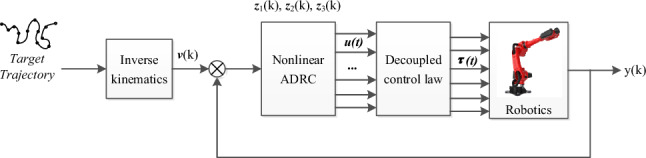
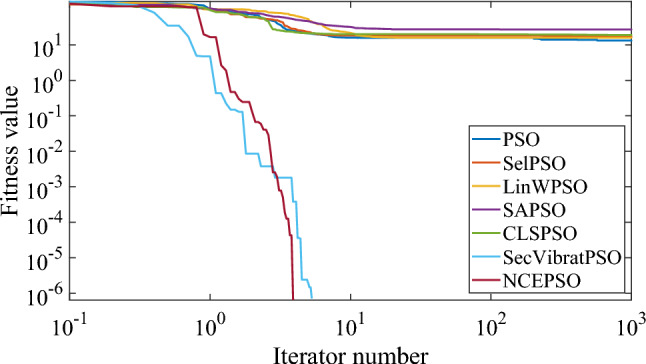
During the trajectory tracking of robotic manipulators, many factors including dead zones, saturation, and uncertain dynamics, greatly increase the modeling and control difficulty. Aiming for this issue, a nonlinear active disturbance rejection control (NADRC)-based control strategy is proposed for robotic manipulators. In this controller, an extended state observer is introduced on basis of the dynamic model, to observe the extend state of model uncertainties and external disturbances. Then, in combination with the nonlinear feedback control structure, the robust trajectory tracking of robotic manipulators is achieved. Furthermore, to optimize the key parameters of the controller, an improved particle swarm optimization algorithm (IPSO) is designed using chaos theory, which improves the tracking accuracy of the proposed NDRC strategy effectively. Finally, using comparative studies, the effectiveness of the proposed control strategy is demonstrated by comparing with several commonly used controllers.
在机器人操纵器的轨迹跟踪过程中,包括死区、饱和以及不确定动力学等在内的诸多因素,极大地增加了建模和控制难度。针对这一问题,提出了一种基于非线性自抗扰控制(NADRC)的机器人操纵器控制策略。在该控制器中,基于动态模型引入了扩展状态观测器,以观测模型不确定性和外部干扰的扩展状态。然后,结合非线性反馈控制结构,实现了机器人操纵器的鲁棒轨迹跟踪。此外,为了优化控制器的关键参数,利用混沌理论设计了一种改进的粒子群优化算法(IPSO),有效提高了所提NDRC策略的跟踪精度。最后,通过对比研究,与几种常用控制器进行比较,验证了所提控制策略的有效性。