State Key Laboratory of Mining Response and Disaster Prevention and Control in Deep Coal, Anhui University of Science and Technology, Huainan 232000, China.
College of Mechanical Engineering, Anhui University of Science and Technology, Huainan 232000, China.
Sensors (Basel). 2023 Apr 19;23(8):4092. doi: 10.3390/s23084092.
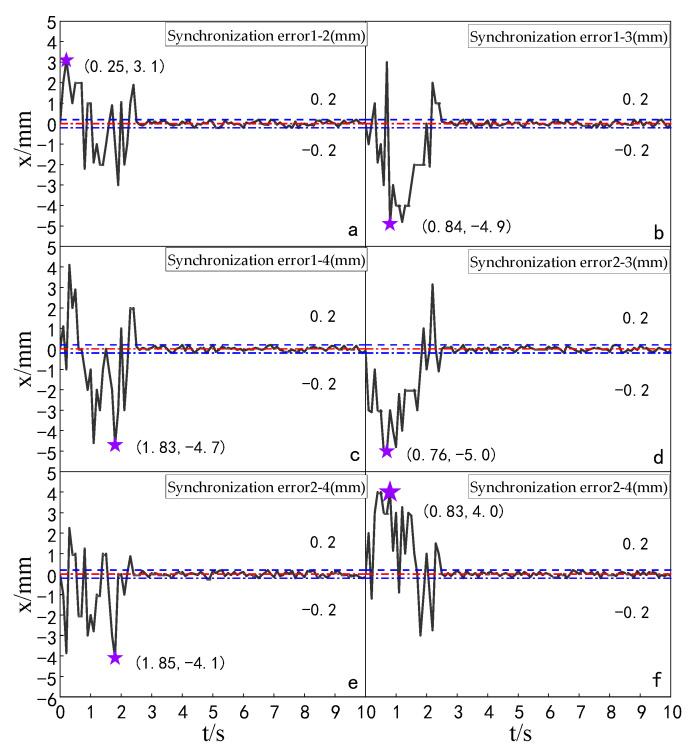
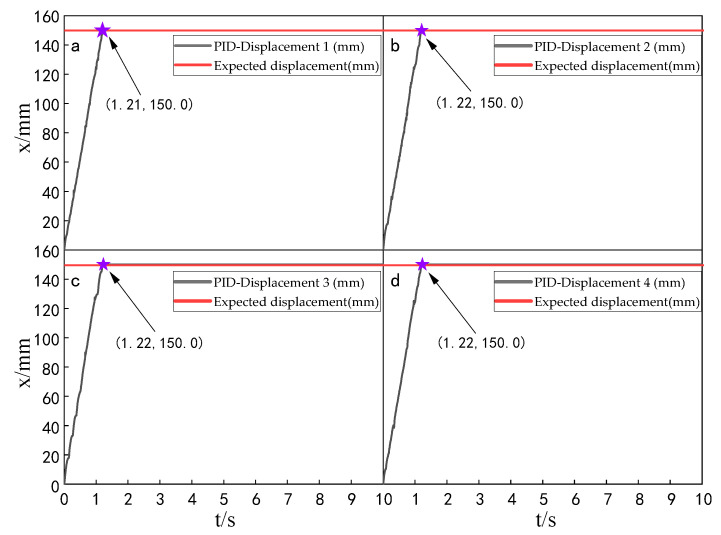
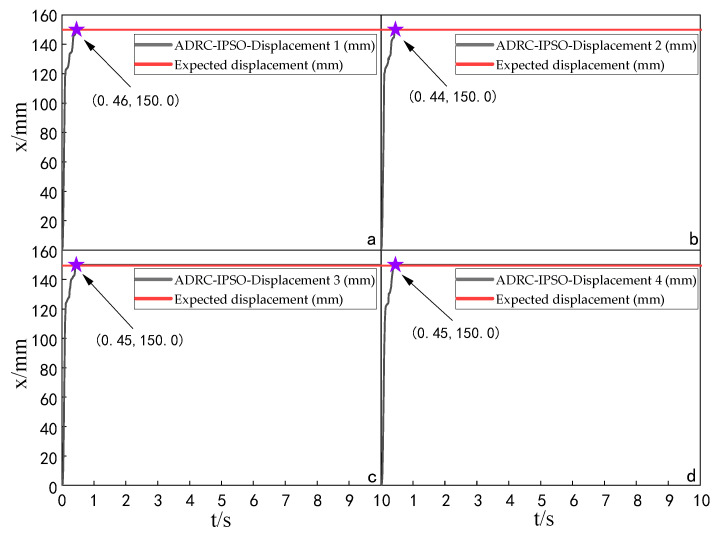
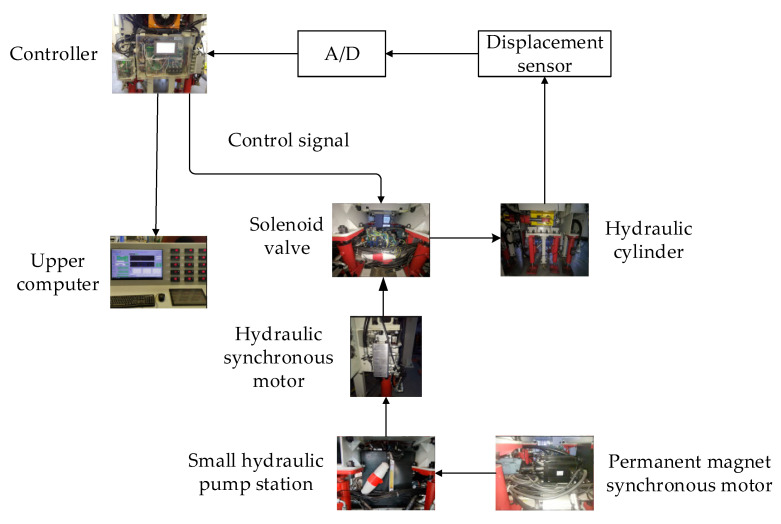
In order to solve the problems of nonlinearity, uncertainty and coupling of multi-hydraulic cylinder group platform of a digging-anchor-support robot, as well as the lack of synchronization control accuracy of hydraulic synchronous motors, an improved Automatic Disturbance Rejection Controller-Improved Particle Swarm Optimization (ADRC-IPSO) position synchronization control method is proposed. The mathematical model of a multi-hydraulic cylinder group platform of a digging-anchor-support robot is established, the compression factor is used to replace the inertia weight, and the traditional Particle Swarm Optimization (PSO) algorithm is improved by using the genetic algorithm theory to improve the optimization range and convergence rate of the algorithm, and the parameters of the Active Disturbance Rejection Controller (ADRC) were adjusted online. The simulation results verify the effectiveness of the improved ADRC-IPSO control method. The experimental results show that, compared with the traditional ADRC, ADRC-PSO and PID controller, the improved ADRC-IPSO has better position tracking performance and shorter adjusting time, and its step signal synchronization error is controlled within 5.0 mm, and the adjusting time is less than 2.55 s, indicating that the designed controller has better synchronization control effect.
为了解决挖掘-锚固-支撑机器人多液压缸组平台的非线性、不确定性和耦合问题,以及液压同步电机同步控制精度的不足,提出了一种改进的自抗扰控制器-改进的粒子群优化(ADRC-IPSO)位置同步控制方法。建立了挖掘-锚固-支撑机器人多液压缸组平台的数学模型,用压缩因子代替惯性权重,利用遗传算法理论对传统粒子群优化(PSO)算法进行改进,提高算法的优化范围和收敛速度,并在线调整自抗扰控制器(ADRC)的参数。仿真结果验证了改进的 ADRC-IPSO 控制方法的有效性。实验结果表明,与传统 ADRC、ADRC-PSO 和 PID 控制器相比,改进的 ADRC-IPSO 具有更好的位置跟踪性能和更短的调整时间,其阶跃信号同步误差控制在 5.0mm 以内,调整时间小于 2.55s,表明所设计的控制器具有更好的同步控制效果。