Pang Shengli, Zhang Bohan, Lu Jintian, Pan Ruoyu, Wang Honggang, Wang Zhe, Xu Shiji
College of Communication and Information Engineering, Xi'an University of Posts and Telecommunications, Xi'an 710121, China.
Sensors (Basel). 2024 Sep 10;24(18):5873. doi: 10.3390/s24185873.
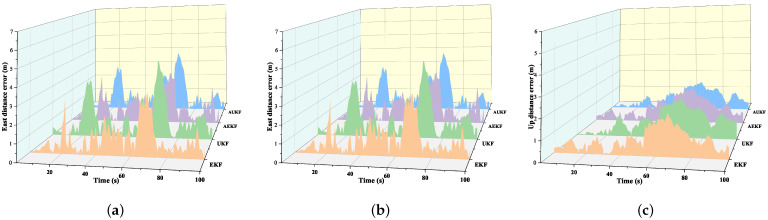
Utilizing reliable and accurate positioning and navigation systems is crucial for saving the lives of rescue personnel and accelerating rescue operations. However, Global Navigation Satellite Systems (GNSSs), such as GPS, may not provide stable signals in dense forests. Therefore, integrating multiple sensors like GPS and Inertial Measurement Units (IMUs) becomes essential to enhance the availability and accuracy of positioning systems. To accurately estimate rescuers' positions, this paper employs the Adaptive Unscented Kalman Filter (AUKF) algorithm with measurement noise variance matrix adaptation, integrating IMU and GPS data alongside barometric altitude measurements for precise three-dimensional positioning in complex environments. The AUKF enhances estimation robustness through the adaptive adjustment of the measurement noise variance matrix, particularly excelling when GPS signals are interrupted. This study conducted tests on two-dimensional and three-dimensional road scenarios in forest environments, confirming that the AUKF-algorithm-based integrated navigation system outperforms the traditional Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and Adaptive Extended Kalman Filter (AEKF) in emergency rescue applications. The tests further evaluated the system's navigation performance on rugged roads and during GPS signal interruptions. The results demonstrate that the system achieves higher positioning accuracy on rugged forest roads, notably reducing errors by 18.32% in the north direction, 8.51% in the up direction, and 3.85% in the east direction compared to the EKF. Furthermore, the system exhibits good adaptability during GPS signal interruptions, ensuring continuous and accurate personnel positioning during rescue operations.
使用可靠且精确的定位和导航系统对于拯救救援人员的生命以及加速救援行动至关重要。然而,诸如全球定位系统(GPS)之类的全球导航卫星系统(GNSS)在茂密森林中可能无法提供稳定信号。因此,整合GPS和惯性测量单元(IMU)等多个传感器对于提高定位系统的可用性和准确性变得至关重要。为了准确估计救援人员的位置,本文采用具有测量噪声方差矩阵自适应功能的自适应无迹卡尔曼滤波器(AUKF)算法,将IMU和GPS数据与气压高度测量数据相结合,以便在复杂环境中进行精确的三维定位。AUKF通过自适应调整测量噪声方差矩阵来增强估计的鲁棒性,在GPS信号中断时表现尤为出色。本研究在森林环境中的二维和三维道路场景上进行了测试,证实基于AUKF算法的组合导航系统在应急救援应用中优于传统的扩展卡尔曼滤波器(EKF)、无迹卡尔曼滤波器(UKF)和自适应扩展卡尔曼滤波器(AEKF)。测试还评估了该系统在崎岖道路和GPS信号中断期间的导航性能。结果表明,该系统在崎岖的森林道路上实现了更高的定位精度,与EKF相比,在北向误差显著降低了18.32%,在向上方向降低了8.51%,在东向降低了3.85%。此外,该系统在GPS信号中断期间表现出良好的适应性,确保了救援行动期间人员的连续和准确定位。