Silva Ivo, Silva Hélder, Botelho Fabricio, Pendão Cristiano
CMEMS-Center for Microelectromechanical Systems, University of Minho, 4800-058 Guimarães, Portugal.
ALGORITMI Research Center, University of Minho, 4800-058 Guimarães, Portugal.
Sensors (Basel). 2024 Sep 10;24(18):5880. doi: 10.3390/s24185880.
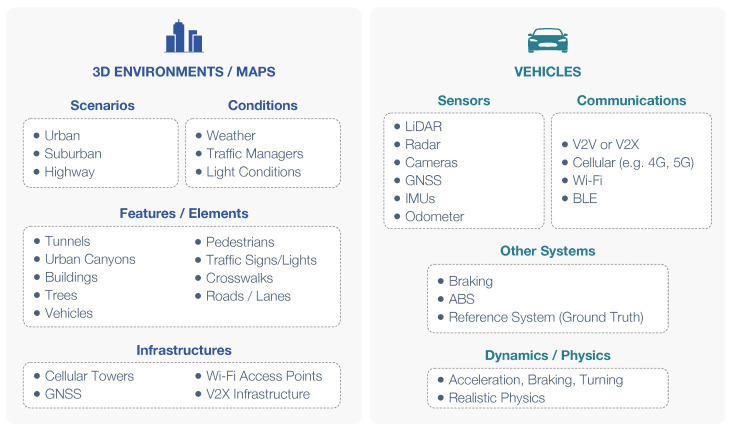
Recent advancements in vehicle technology have stimulated innovation across the automotive sector, from Advanced Driver Assistance Systems (ADAS) to autonomous driving and motorsport applications. Modern vehicles, equipped with sensors for perception, localization, navigation, and actuators for autonomous driving, generate vast amounts of data used for training and evaluating autonomous systems. Real-world testing is essential for validation but is complex, expensive, and time-intensive, requiring multiple vehicles and reference systems. To address these challenges, computer graphics-based simulators offer a compelling solution by providing high-fidelity 3D environments to simulate vehicles and road users. These simulators are crucial for developing, validating, and testing ADAS, autonomous driving systems, and cooperative driving systems, and enhancing vehicle performance and driver training in motorsport. This paper reviews computer graphics-based simulators tailored for automotive applications. It begins with an overview of their applications and analyzes their key features. Additionally, this paper compares five open-source (CARLA, AirSim, LGSVL, AWSIM, and DeepDrive) and ten commercial simulators. Our findings indicate that open-source simulators are best for the research community, offering realistic 3D environments, multiple sensor support, APIs, co-simulation, and community support. Conversely, commercial simulators, while less extensible, provide a broader set of features and solutions.
车辆技术的最新进展推动了整个汽车行业的创新,从先进驾驶辅助系统(ADAS)到自动驾驶和赛车运动应用。现代车辆配备了用于感知、定位、导航的传感器以及用于自动驾驶的执行器,会生成大量用于训练和评估自动驾驶系统的数据。实际道路测试对于验证至关重要,但复杂、昂贵且耗时,需要多辆车和参考系统。为应对这些挑战,基于计算机图形学的模拟器通过提供高保真3D环境来模拟车辆和道路使用者,提供了一个极具吸引力的解决方案。这些模拟器对于开发、验证和测试ADAS、自动驾驶系统和协同驾驶系统,以及提升赛车运动中的车辆性能和驾驶员培训至关重要。本文综述了针对汽车应用的基于计算机图形学的模拟器。首先概述其应用,并分析其关键特性。此外,本文比较了五个开源模拟器(CARLA、AirSim、LGSVL、AWSIM和DeepDrive)和十个商业模拟器。我们的研究结果表明,开源模拟器最适合研究群体,提供逼真的3D环境、多传感器支持、应用程序编程接口、联合仿真和社区支持。相反,商业模拟器虽然扩展性较差,但提供了更广泛的功能和解决方案。