de Ponte Müller Fabian
German Aerospace Center (DLR), Institute of Communications and Navigation, 82234Wessling, Germany.
Sensors (Basel). 2017 Jan 31;17(2):271. doi: 10.3390/s17020271.
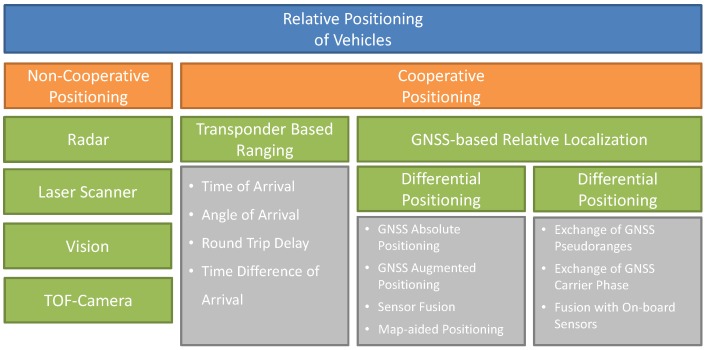
Future driver assistance systems will rely on accurate, reliable and continuous knowledge on the position of other road participants, including pedestrians, bicycles and other vehicles. The usual approach to tackle this requirement is to use on-board ranging sensors inside the vehicle. Radar, laser scanners or vision-based systems are able to detect objects in their line-of-sight. In contrast to these non-cooperative ranging sensors, cooperative approaches follow a strategy in which other road participants actively support the estimation of the relative position. The limitations of on-board ranging sensors regarding their detection range and angle of view and the facility of blockage can be approached by using a cooperative approach based on vehicle-to-vehicle communication. The fusion of both, cooperative and non-cooperative strategies, seems to offer the largest benefits regarding accuracy, availability and robustness. This survey offers the reader a comprehensive review on different techniques for vehicle relative positioning. The reader will learn the important performance indicators when it comes to relative positioning of vehicles, the different technologies that are both commercially available and currently under research, their expected performance and their intrinsic limitations. Moreover, the latest research in the area of vision-based systems for vehicle detection, as well as the latest work on GNSS-based vehicle localization and vehicular communication for relative positioning of vehicles, are reviewed. The survey also includes the research work on the fusion of cooperative and non-cooperative approaches to increase the reliability and the availability.
未来的驾驶辅助系统将依赖于对其他道路参与者位置的准确、可靠且持续的了解,这些参与者包括行人、自行车和其他车辆。满足这一需求的常用方法是在车辆内部使用车载测距传感器。雷达、激光扫描仪或基于视觉的系统能够检测其视线范围内的物体。与这些非合作测距传感器不同,合作方法遵循一种策略,即其他道路参与者积极支持相对位置的估计。通过使用基于车对车通信的合作方法,可以解决车载测距传感器在检测范围、视角和遮挡方面的局限性。合作策略与非合作策略的融合,在准确性、可用性和鲁棒性方面似乎能带来最大的益处。本综述为读者提供了关于车辆相对定位不同技术的全面回顾。读者将了解车辆相对定位时的重要性能指标、市面上已有的以及目前正在研究的不同技术、它们预期的性能以及固有的局限性。此外,还综述了基于视觉的车辆检测系统领域的最新研究,以及基于全球导航卫星系统(GNSS)的车辆定位和用于车辆相对定位的车辆通信方面的最新工作。本综述还包括关于融合合作与非合作方法以提高可靠性和可用性的研究工作。