School of Electrical and Computer Engineering, Addis Ababa University, Addis Ababa, Ethiopia.
PLoS One. 2024 Oct 10;19(10):e0309098. doi: 10.1371/journal.pone.0309098. eCollection 2024.
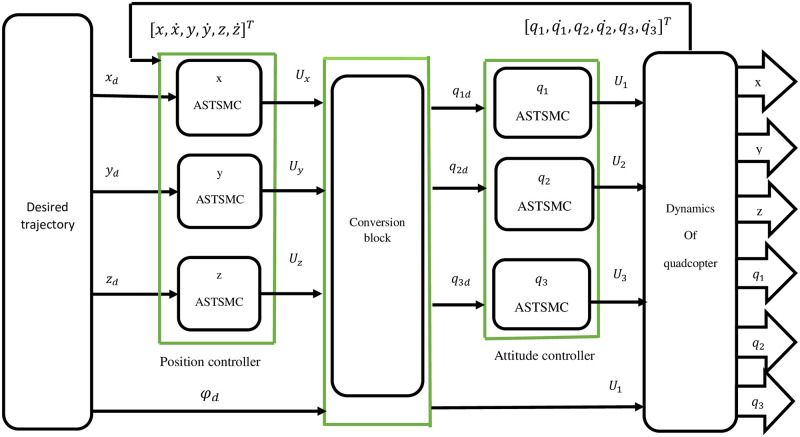
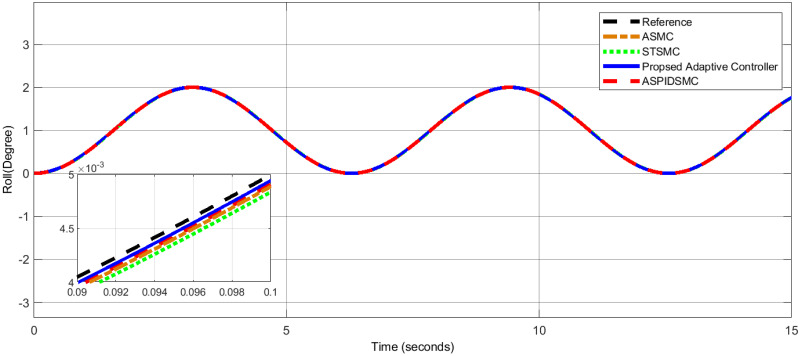
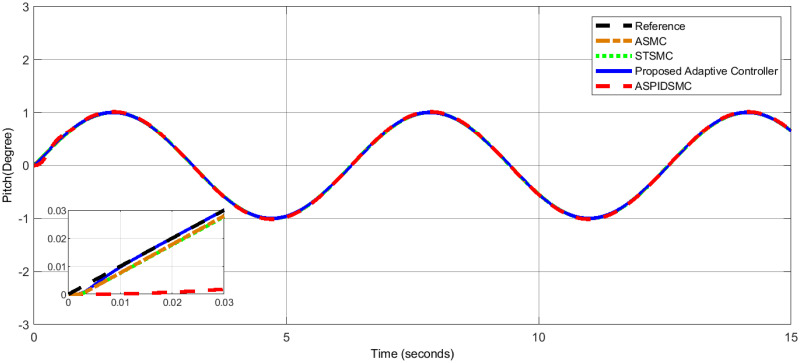
This paper presents an improved nonsingular adaptive super twisting sliding mode control for tracking of a quadrotor system in the presence of external disturbances and uncertainty. The initial step involves developing a dynamic model for the quadrotor that is free from singularities, achieved through the utilization of the Newton-Quaternion formalism. Then, the super twisting algorithm is used to develop a novel sliding mode control that mitigates chattering. Particle Swarm Optimization (PSO) is employed for the adjustment of the controller gains. Moreover, to maintain stable control of the quadcopter, even in scenarios where the upper limit of disturbances is unknown, an adaptive rule grounded in Lyapunov stability is applied. Simulation results demonstrate that the proposed controller reduces tracking errors to 0.1% for roll, 0.05% for pitch, and 2.2% for altitude, outperforming other state-of-the-art sliding mode controllers. Additionally, the proposed controller effectively rejects disturbances, maintaining minimal steady-state errors of 0.01° for roll, 0.02° for pitch, and 0.001° for yaw, significantly better than conventional controllers. These results highlight tracking and disturbance rejection capabilities of the proposed controller, making its real-time implementation for quadrotor Unmanned Aerial Vehicles (UAVs) feasible.
本文提出了一种改进的非奇异自适应超螺旋滑模控制方法,用于在存在外部干扰和不确定性的情况下对四旋翼系统进行跟踪。首先,通过使用牛顿-四元数公式,建立了一个无奇异点的四旋翼动态模型。然后,采用超螺旋算法设计了一种新的滑模控制方法,以减轻抖振。粒子群优化(PSO)用于调整控制器增益。此外,为了在未知干扰上限的情况下保持四旋翼的稳定控制,应用了基于李雅普诺夫稳定性的自适应规则。仿真结果表明,与其他先进的滑模控制器相比,所提出的控制器可将滚转、俯仰和高度的跟踪误差分别降低到 0.1%、0.05%和 2.2%。此外,该控制器有效地抑制了干扰,使滚转、俯仰和偏航的稳态误差最小分别达到 0.01°、0.02°和 0.001°,显著优于传统控制器。这些结果突出了所提出的控制器的跟踪和干扰抑制能力,使其在四旋翼无人机(UAV)中的实时实现成为可能。