Seo Dongwoo, Kang Jaeyoung
Department of Mechanical Engineering, Inha University, Incheon 22212, Republic of Korea.
Biomimetics (Basel). 2024 Oct 17;9(10):633. doi: 10.3390/biomimetics9100633.
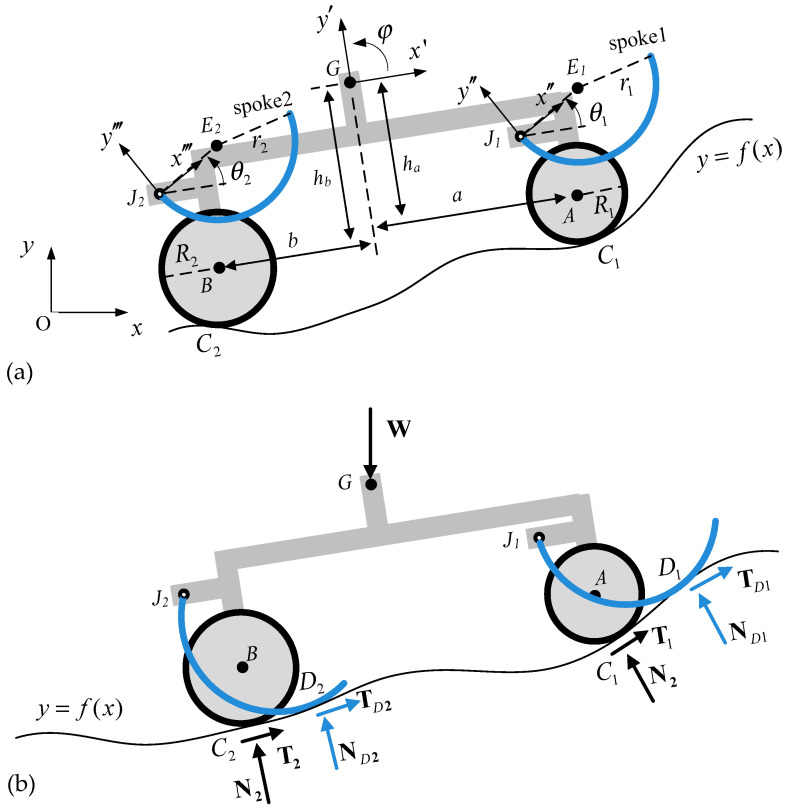
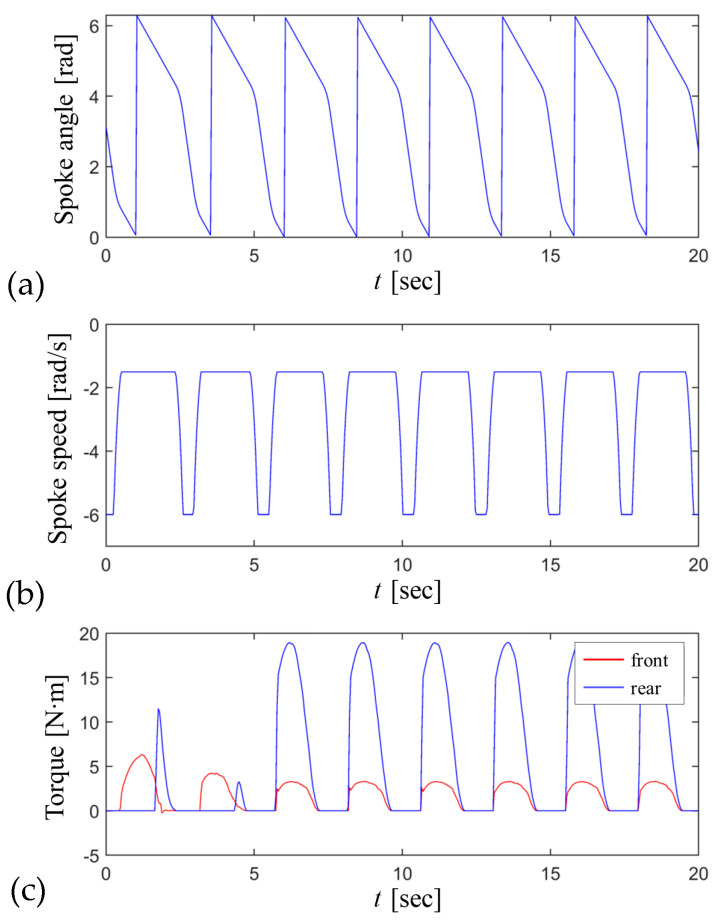
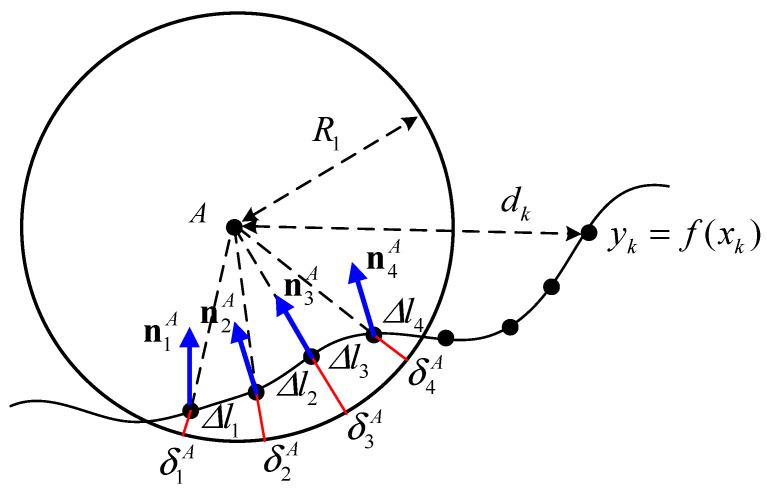
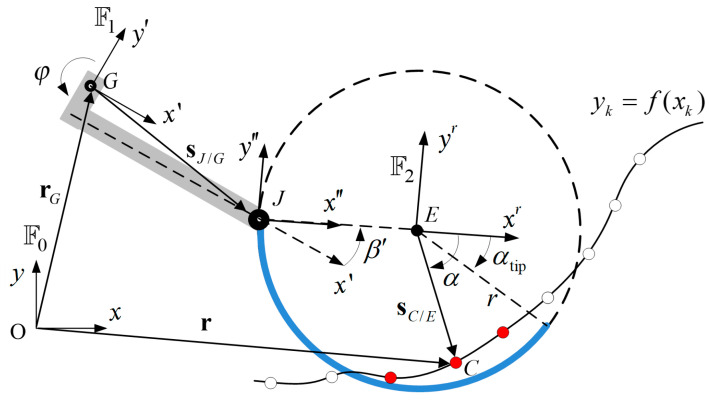
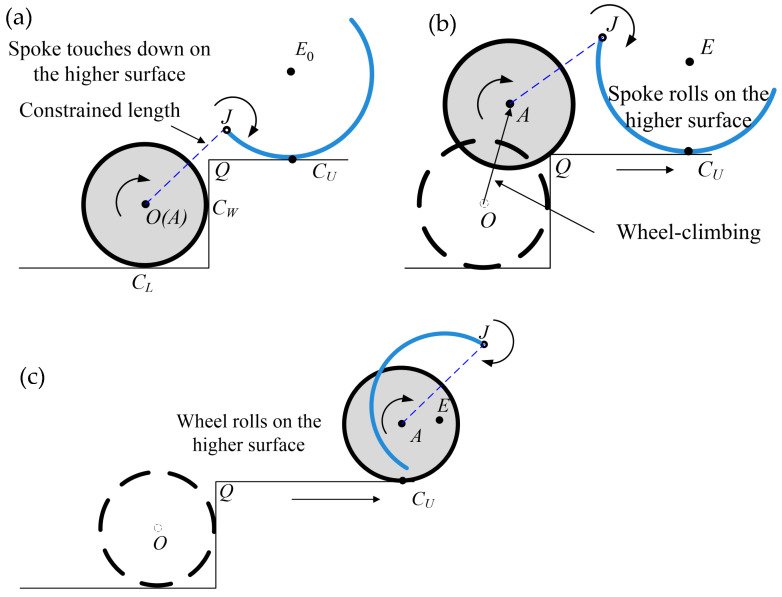
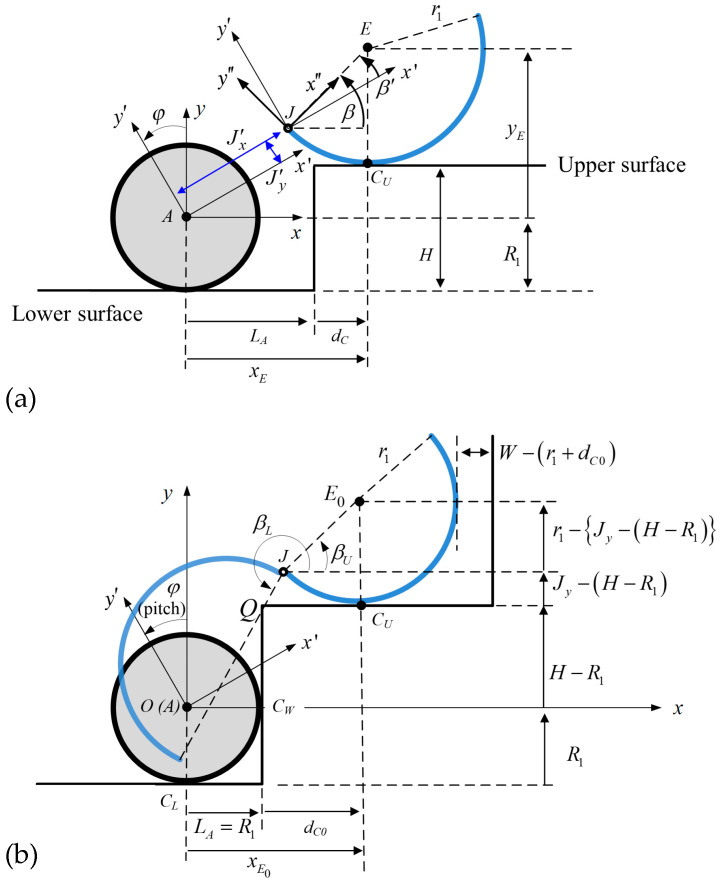
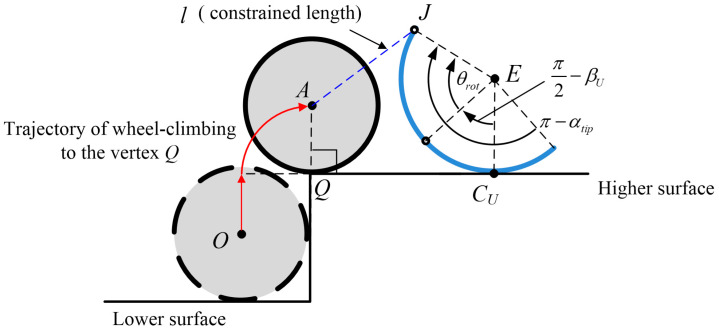
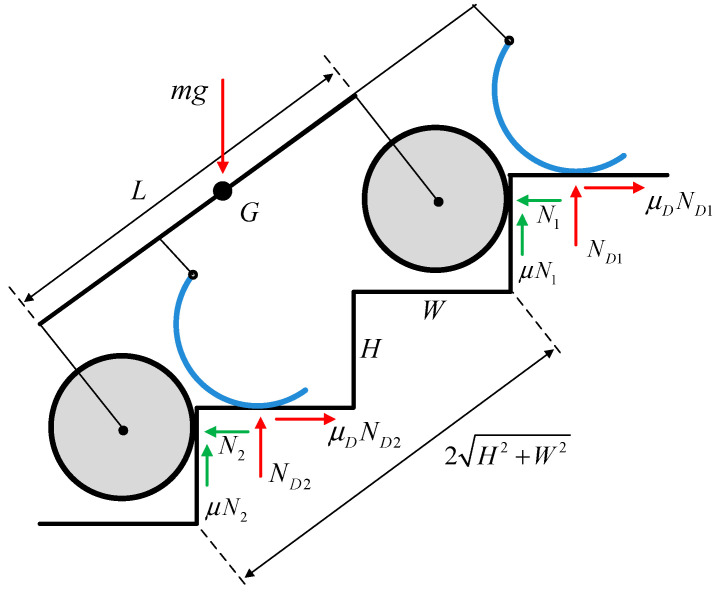
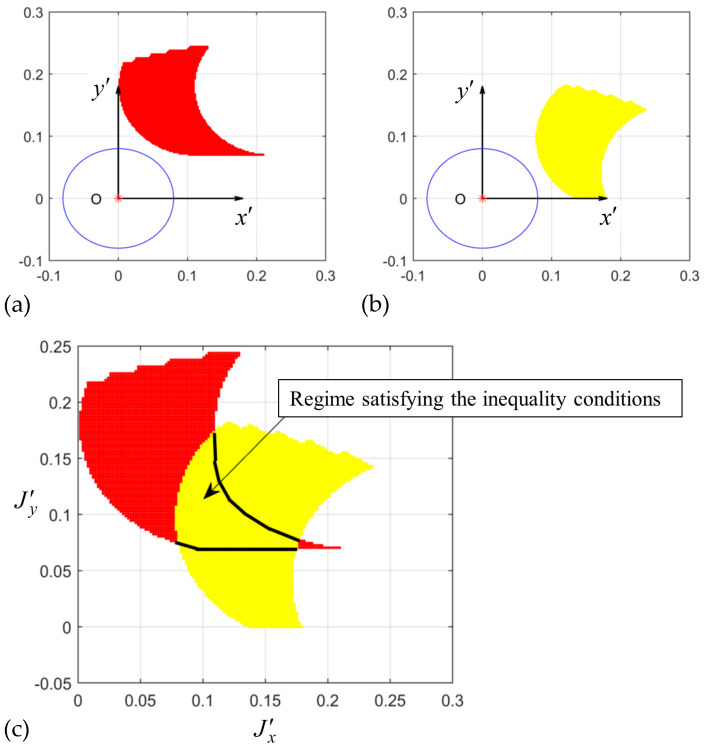
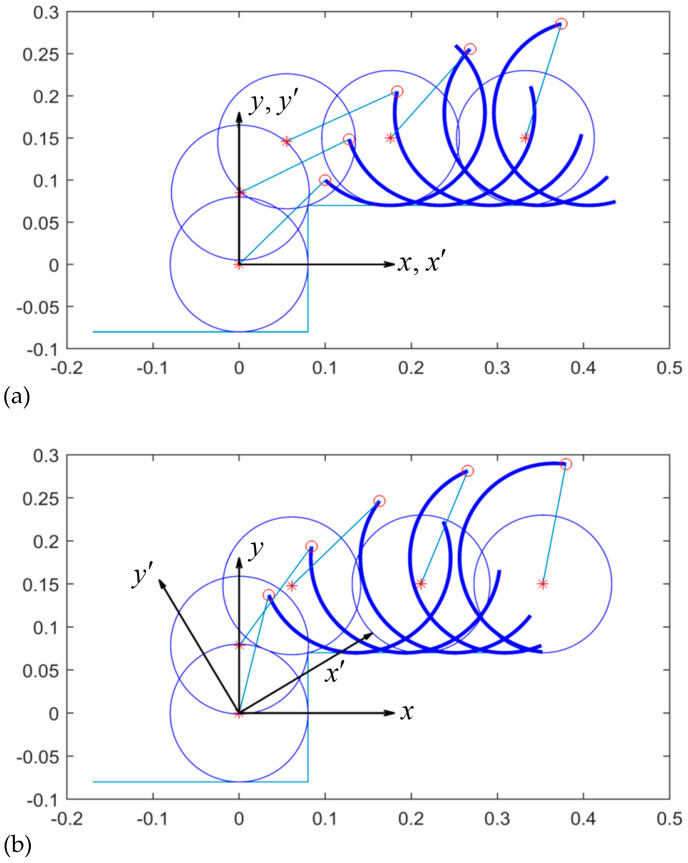
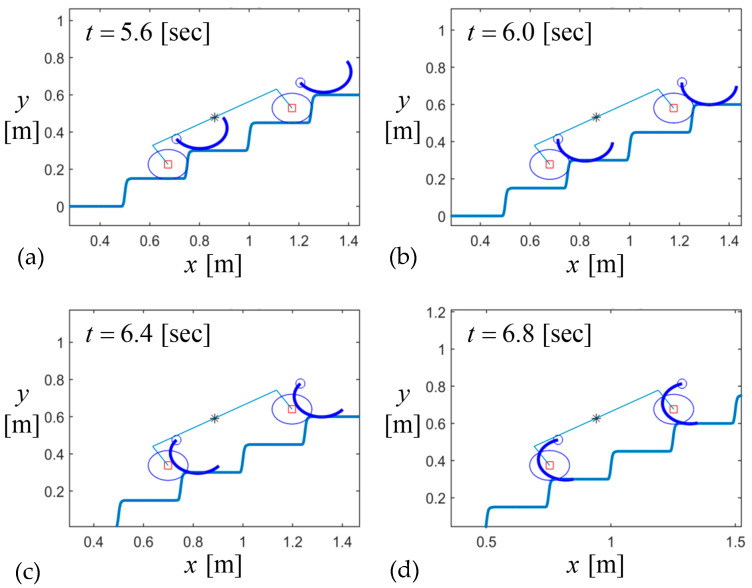
This study proposes a new wheel-leg mechanism concept and formulations for the kinematics and dynamics of a stair-climbing robot utilizing the rotating leg locomotion of curved spokes and rolling tires. The system consists of four motor-driven tires and four curved-spoke legs. The curved-spoke leg is semicircle-like and is used to climb stairs. Once the spoke leg rolls on the surface, it lifts and pulls the mating wheel toward the surface, owing to the kinematic constraint between the spoke and the wheel. Single-wheel climbing is a necessary condition for the stair climbing of whole robots equipped with front and rear axles. This study proposes the design requirements of a spoke leg for the success of single-wheel climbing in terms of kinematic inequality equations according to the scenario of single-wheel climbing. For a design configuration that enables single-wheel climbing, the required minimum friction coefficient for the static analysis of the stair-climbing wheeled robots is demon-strated. Thereafter, the stair-climbing ability is validated through the dynamic equations that enable the frictional slip of the tires, as well as the curved-spoke legs. Lastly, the results revealed that the rotating locomotion of the well-designed curved-spoke legs effectively enables the stair climbing of the whole robot.
本研究提出了一种新的轮腿机构概念以及用于利用弯曲辐条和滚动轮胎的旋转腿运动的爬楼梯机器人的运动学和动力学公式。该系统由四个电动轮胎和四个弯曲辐条腿组成。弯曲辐条腿呈半圆形,用于爬楼梯。一旦辐条腿在表面滚动,由于辐条和轮子之间的运动学约束,它会将配对的轮子抬起并拉向表面。单轮攀爬是配备前后轴的整个机器人爬楼梯的必要条件。本研究根据单轮攀爬场景,通过运动学不等式方程提出了辐条腿成功实现单轮攀爬的设计要求。对于能够实现单轮攀爬的设计构型,论证了爬楼梯轮式机器人静态分析所需的最小摩擦系数。此后,通过使轮胎以及弯曲辐条腿产生摩擦滑动的动力学方程验证了爬楼梯能力。最后,结果表明,精心设计的弯曲辐条腿的旋转运动有效地实现了整个机器人的爬楼梯。